 Deutsch
Deutsch English
English français
français русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


Ruf uns jetzt an
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.


Eigenschaften
Art.-Nr.:
AR4215Zahlung:
FOBProduktherkunft:
ChinaFarbe:
whiteHafen:
ShenZhen portsVorlaufzeit:
20 days
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
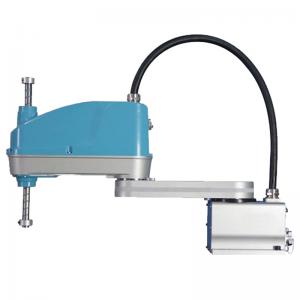
High Geschwindigkeit und Präzision SCARA Roboter
Technische Daten:
Programmierung: Programmiersprache AR, g-Code
am schnellsten schlagen Geschwindigkeit: 0,38 s
Genauigkeit: weniger als 0,02 mm
Anwendung: Online-Geschwindigkeit zu folgen
Merkmale:
Anwendung:
geeignet für PCBA Stecker, Handhabung, visuelle Sortierung, Montage, Schrauben, Laden, Transport, Steckmaschine, Löten und andere hochpräzise Branchen --- Elektronik- und Lebensmittelindustrie .
Leistung Benchmark - Parameter:
Modellname | ADT | TOSHIBA | EPSON | YAMAHA | ||
AR4215 | THL400 | LS3-401 | YK400XG-150 | |||
Produktmerkmale | Hochgeschwindigkeit, hochpräzise und kostengünstig | Niedrige Kosten, geringes Gewicht, Energie | Hochgeschwindigkeit, hochpräzise und kostengünstig | kostengünstige Maschine | ||
Achsenspezifikation | x-Achse | Armlänge | 200mm | 225mm | 225mm | 250mm |
Drehbereich | ± 127 ° | ± 125 ° | ± 132 ° | ± 140 ° | ||
y-Achse | Armlänge | 200mm | 200mm | 175mm | 150mm | |
Drehbereich | ± 142 ° | ± 145 ° | ± 141 ° | ± 144 ° | ||
Z-Achse | Route | 150mm | 160mm | 150mm | 150mm | |
r-Achse | Drehbereich | ± 360 ° | ± 360 ° | ± 360 ° | ± 360 ° | |
höchste Geschwindigkeit | x-Achse | 600 ° / S | 660 ° / S |
|
| |
y-Achse | 375 ° / S | 660 ° / S |
|
| ||
X-, y-Achsensynthese | 5,5 m / s | 6,3 m / s | 6m / s | 6.1m / s | ||
Z-Achse | 1.3m / s | 1,2 m / s | 1.1m / s | 1.1m / s | ||
r-Achse | 1667 ° / s | 1500 ° / s | 2600 ° / s | 1020 ° / s | ||
Positioniergenauigkeit wiederholen | X, y-Achse | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | ± 0,01 mm | |
Z-Achse | ± 0,01 mm | ± 0,015 mm | ± 0,01 mm | ± 0,01 mm | ||
r-Achse | ± 0,005 ° | ± 0,007 ° | ± 0,01 ° | ± 0,004 ° | ||
Standardzykluszeit | 0,45s | 0,47 | 0,42s | 0,49 | ||
bewertet / Tragfähigkeit | 2 kg / 5 kg | 2 kg / 5 kg | 1 kg / 3 kg | 5kg | ||
Die Achse r ermöglicht das Lastträgheitsmoment (Nennwert / max) | 0,01 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | 0,05 kg · m2 | ||
0,04 kg · m2 | 0,005 kg · m2 | |||||
Benutzersignalleitung | 0,2sq × 16 Zeilen | 8 Eingänge / 8 Ausgänge | 0,15sq × 15 Linien | 0,2sq × 10 Linien | ||
6 Eingabe / 8 Ausgabe | ||||||
Benutzer Luftröhre | Ф6 × 2 | φ4 × 3 | φ4 × 1 | φ4 × 3 | ||
Ф6 × 2 | ||||||
Grenzschutz | 1, das Softwarelimit | 1, das Softwarelimit | 1, das Softwarelimit | 1, das Softwarelimit | ||
2 die mechanische Grenze (X, Y, z Achse) | 2 die mechanische Grenze (X, Y, z Achse) | 2 die mechanische Grenze (X, Y, z Achse) | 2 die mechanische Grenze (X, Y, z Achse) | |||
Gewicht | 13Kg | 13Kg | 14Kg | 19Kg | ||
Bewegen Raum:
Auswahl Highlights:
1. Arbeitsumfang: eine Roboterarmlänge, Betriebsbereich
2. Laden: Greifer Design, die Trägheit so gering wie möglich
3. Genauigkeit: Positioniergenauigkeit wiederholen
4. Der Takt von Arbeiten: Aktionszykluszeit, Gasverbrauchszeit Aktion
5.I / o Punkte: universelle Ein- und Ausgangspunkte
6. visuelles Paket: statisches Crawlen, dynamisches Crawlen
7. Kommunikation: i / O, Netzwerk, seriell

ADTECH 4 Achsen SCARA Roboterarm mit hoher Leistung und ausgezeichneter Präzision

Industrieroboterhersteller in China zu günstigen Preisen ADTECH FR5215 System 5500mm Armlänge 4-Achsen-Heben scara roboter mit avs vision system. ADTECH ist professionell in 4-Achsen Scara F & E, Produktion und Service von RoboternFür Produkte reduzieren Menschen Kosten. Immer mehr Roboter werden in der Produktion eingesetzt. line.ADTECH scara Roboter kann NACHI, TOSHIBA usw. ersetzen.japanische Marke, es ist Anwendung für PCBA Montage , VerschraubenLaden, Verpacken usw. elektrisches Feld
OEM Scara Roboter sind für die Fabrik mit elektrischen Komponenten wie Samsung, Foxconn, LG ausgelegtund Kanon usw.

TR600B vierachsig SCARA Industrieroboter Der Roboter ist ein Mehrgelenk vierachsig Roboter mit vollständig unabhängigen EigentumsrechtenEs verwendet eine Hochleistungssteuerung zur Steuerung des Roboters, um eine Hochgeschwindigkeitspunktbewegung, eine räumliche lineare Interpolationsbewegung, eine räumliche Bogeninterpolation und andere Funktionen zu erreichenEs eignet sich für den Transport, verschiedene industrielle Anlässe wie Be- und Entladen, Punktschweißen, Kleben usw.

Metallverarbeitung Industrie: Stanzen auf Stanzmaschinen, CNC Be- und Entladen, Werkstückschleifen, Entgraten; elektronische Produkte Industrie: Montage, Prüfung und Handhabung von IC-Chips, Punktschweißen, PCBA Löten, Kleben, Aufschrauben, Einstecken, Werkstück Polieren; Automobil- und Motorradteile Industrie: Handhabung, Kleben, Punktschweißen; LCD / LED und Glasindustrie: Handhabung von Glasplatten, Montage von lcm-Modulen, Handhabung von Siliziumwafern und Bildschirmen;Laser Industrie: Punktschweißen, Schneiden; Haushaltsgeräte Industrie: Montage, Handhabung und Verschraubung von HaushaltsgerätenForschungsbereiche: Schülerunterricht, Schulforschung und Entwicklung.

TR800B vierachsig SCARA Industrie Roboter: Der Roboter ist ein Mehrgelenk vierachsig Roboter mit vollständigen unabhängigen Eigentumsrechten von LBD. Es verwendet eine Hochleistungssteuerung zur Steuerung des Roboters, um eine schnelle Punktbewegung, eine räumliche lineare Interpolationsbewegung, eine räumliche Bogeninterpolation und andere Funktionen zu erreichenes ist zum Handhaben, Laden und Entladen geeignet, Punktschweißen, Kleben und andere industrielle Anlässe

Die SCARA MehrfachverbindungManipulator gehört zum Unternehmen hochpräzise, schnelle und leistungsstarke Roboter This Das Produkt ist hauptsächlich für die Anwendung von Roboter-Verriegelungsschrauben im 3C vorgesehenIndustrie This Das Produkt basiert auf dem zuvor entwickelten SCARA Roboterkörper mit 600 Armlängen. eine spezielle nicht standard Roboter zum Verriegeln von Schrauben mit visueller Positionierung Funktion.

Yaskawa Scara Robot SOC-Serie: Bei der MOTOMAN-SOC-Serie handelt es sich um einen SCARA-Roboter, der speziell für Hochgeschwindigkeitseinsätze entwickelt wurde. Es eignet sich für verschiedene Szenarien wie Montage, Transport, Verpackung, Sortierung und Inspektion von Kleinteilen.

Hochgeschwindigkeits- und zuverlässige Delta-RoboterEs istmit panasonic aufbauenServosunterstützt Vision Camera in Produktionslinien

4-Achsen-Delta Roboter / Spinne Roboter sind für die Lebensmittelverpackung geeignetDas Robotersichtsystem ist verfügbarauch !

4-Achs-Delta-Roboter sind für die Lebensmittelverpackung in den Produktionslinien konzipiert. wie Schokoladen-, Keks- und Brotfabrikanten.

Industrielle Delta-Spinne Roboter: 400mm-1200mm Arbeitsdurchmesser 1-3kg bewertet Nutzlast KEBA Anhänger lehren

Industrieller Delta-Spider-Roboter: 400mm-1200mm Arbeitsdurchmesser 1-3 kg Nennnutzlast KEBA Teach-Pendant

* Delta-Roboter sind kostengünstig, hochwertig und kostengünstig, können für Kunden im OEM-Design angepasst werden und unterstützen verschiedene visuelle Sensorinformationen. * Das TRD-Roboteranwendungssystem besteht hauptsächlich aus drei Teilen: Roboter, Drahtzuführung und Roboterinstallationsrahmen. Der Roboter besteht aus einem Substrat, einer Motorabdeckung, einer rotierenden Welle, einem Hauptroboterarm; Es besteht aus einem mechanischen Hilfsarm und einem Greiferzentrum.

Der Delta-Roboter ist eine klassische Parallelroboter-Konfigurationes hat die Eigenschaften von dreidimensionalem XYZ Verschiebung und Drehung um die z -Achse. Es bietet die Vorteile einer hohen Geschwindigkeit, einer guten Genauigkeit, einer hohen Zuverlässigkeit, einer hohen Benutzerfreundlichkeit und geringer Wartungskostenes ist weit verbreitet in Hochgeschwindigkeitssortier- und Verpackungsfeldern

* Produkt Vorteile:schnelle Geschwindigkeit, hohe Präzision * Long Lebensdauer und stabile Leistung * Stark Kompatibilität und starke Flexibilität * Einfach Kontrolle und Benutzerfreundlichkeit

*Robotervorteile: schnelle Geschwindigkeit, hohe Präzision *Lange Lebensdauer und stabile Leistung *Starke Kompatibilität und starke Flexibilität *Einfache Steuerung und Benutzerfreundlichkeit



















Bitte lesen Sie weiter, bleiben Sie auf dem Laufenden, abonnieren Sie und wir begrüßen Sie, uns was zu sagendu denkst
 IPv6 Netzwerk unterstützt 粤ICP备2021036697号
IPv6 Netzwerk unterstützt 粤ICP备2021036697号 Onlineservice
Onlineservice 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com