 Deutsch
Deutsch English
English français
français русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


Ruf uns jetzt an
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

Ein Industrieroboter ist ein Mehrgelenk Manipulator oder ein Multi-Freiheitsgrad Maschinengerät, das auf den industriellen Bereich ausgerichtet ist Es kann automatisch Arbeiten ausführen und ist eine Maschine, die auf ihre eigenen Leistungs- und Steuerungsfähigkeiten angewiesen ist, um verschiedene Funktionen zu erreichen es kann von Menschen befohlen werden, und es kann auch in Übereinstimmung mit vorab arrangiert ausgeführt werden Programme. Moderne Industrieroboter können Aufgaben auch nach Prinzipien und Richtlinien ausführen, die von der künstlichen Intelligenz Technologie festgelegt wurden

Der erste Industrieroboter nach ISO Standard wurde von Bill Griffith Taylor im Jahr 1937 hergestellt und im März 1938 in der Zeitschrift meccano veröffentlicht This kranartig Industrieroboter bestehen aus Mekkanteilen und werden von einem einzigen Elektromotor angetrieben This Industrieroboter können Holzklötze in einem vorprogrammierten stapeln Weg


▲ George Davor
Robotik ist eine multidisziplinäre Bereich, der die Bereiche Mechanik, Elektronik, Informatik, Steuerung, künstliche Intelligenz, Physik und Mathematik kombiniert Industrieroboter bestehen aus sechs Grundkomponenten: dynamische Einheiten, Ende des Arms Maschinen, digitale Computersteuerungen, Aktuatoren, Eingabegeräte und Detektoren.

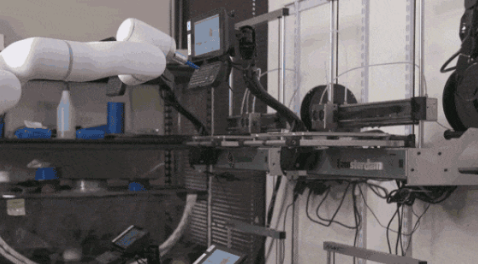

▲ abb Industrieroboter vervollständigte den "Fanta Panzer" Herausforderung
artikulierte Konfiguration: Der Gelenkarm ist der häufigste Roboterarm, der einem menschlichen Arm sehr ähnlich ist normalerweise sechsachsig Maschinen, sie Redundanz bereitstellen und reibungsloser bewegen
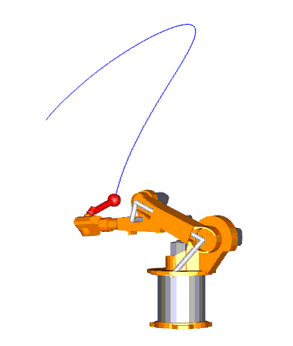
▲ Gelenkkonfiguration

▲ SCARA Konfiguration gemeinsame Konfiguration
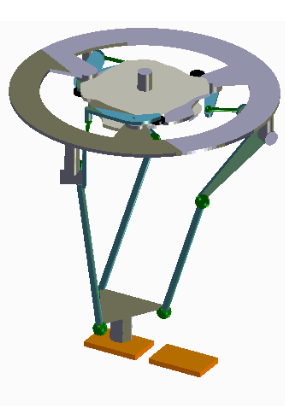
▲ paralleler Industrieroboter
Ein paralleler Mechanismus kann als geschlossener Regelkreis definiert werden Mechanismus, bei dem die bewegliche Plattform und die feste Plattform durch mindestens zwei unabhängige kinematische verbunden sind Ketten hat der Mechanismus zwei oder mehr Freiheitsgrade und wird parallel angetrieben
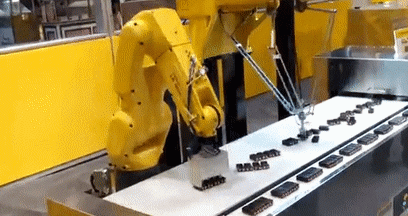
Typische Anwendungen von Industrierobotern sind Schweißen, Lackieren, Montieren, Sammeln und Platzieren (z. B. Verpackung, Palettieren und SMT), Produktinspektion und -prüfung usw .; Alle Aufgaben werden mit hoher Effizienz, Haltbarkeit, Geschwindigkeit und Genauigkeit ausgeführt
Um Arbeitsaufgaben genauer ausführen zu können, enthalten Industrieroboter normalerweise Bildverarbeitungssubsysteme als ihre Vision-Sensoren, die an leistungsstarke Computer oder Controller angeschlossen sind. Für moderne Industrieroboter, Roboter mit künstlicher Intelligenz sind immer wichtiger geworden

TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.




















Bitte lesen Sie weiter, bleiben Sie auf dem Laufenden, abonnieren Sie und wir begrüßen Sie, uns was zu sagendu denkst
 IPv6 Netzwerk unterstützt 粤ICP备2021036697号
IPv6 Netzwerk unterstützt 粤ICP备2021036697号 Onlineservice
Onlineservice 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com