 Deutsch
Deutsch English
English français
français русский
русский español
español português
português العربية
العربية 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt
Ruf uns jetzt an
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.


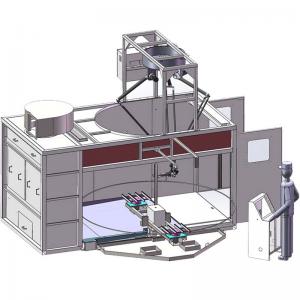
industrielle 6-Achsen-Roboterarm-Trainingsplattform Training Ziele:
* Nützlich 6-Achsen-Roboterarm per Programm laufen lassen
* Nützlich für I / O Steuerung mit Roboter Greifer
* Nützlich zur Verbindung mit SPS
* Nützlich für die tägliche Wartung
Art.-Nr.:
TRE500S-TPZahlung:
CIF / FOBProduktherkunft:
ChinaFarbe:
Blue Black RedHafen:
ShenZhenVorlaufzeit:
15Mindestbestellmenge:
5
TEL : + 86-4000988557;
Skype ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.
Anweisung von sechsachsig Lehrplattform für Robotertraining
Zuerst: Einführung
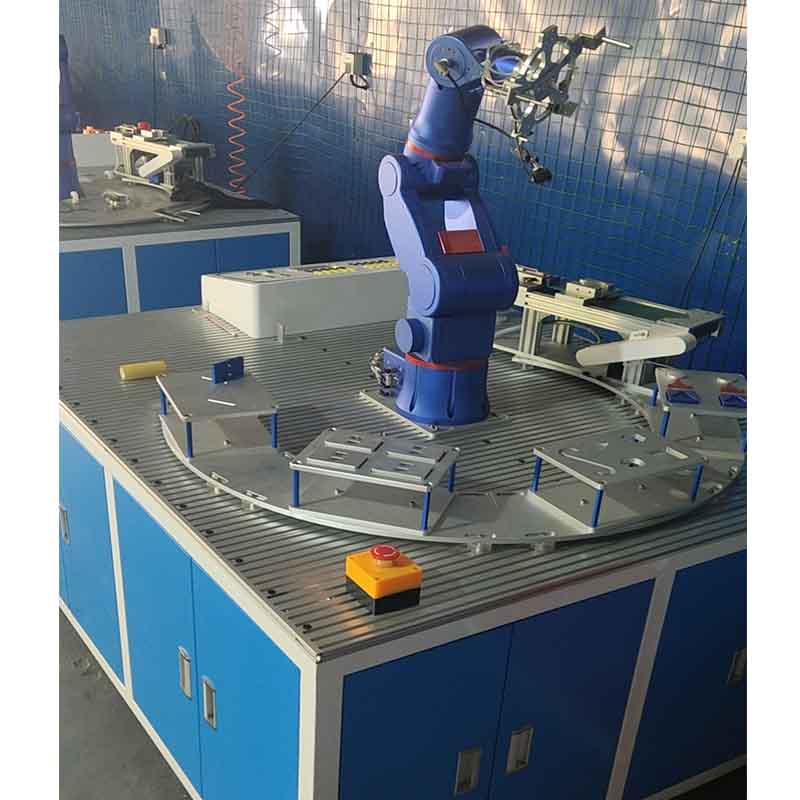
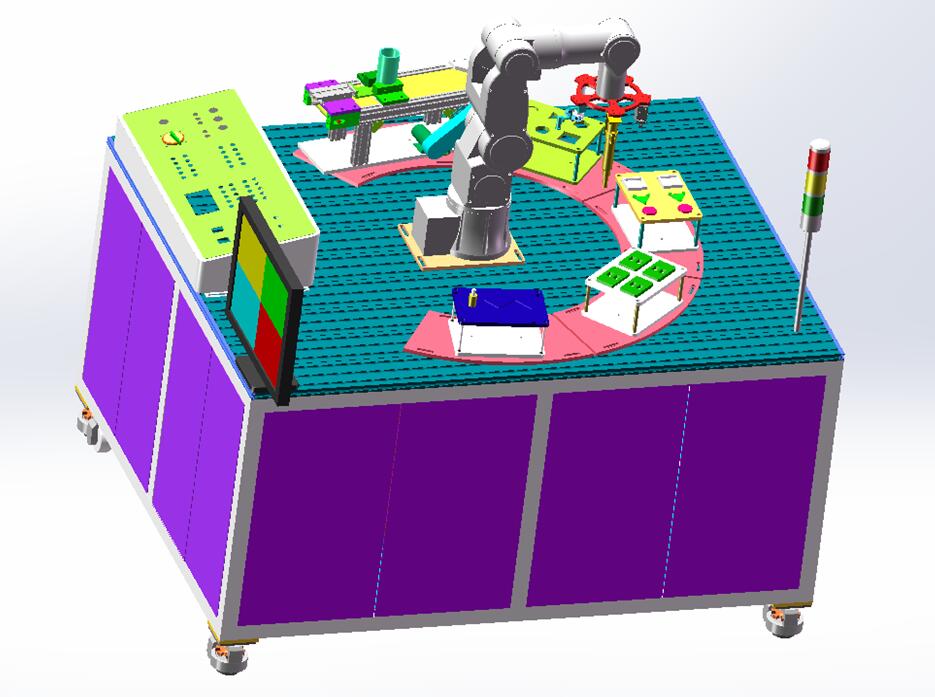
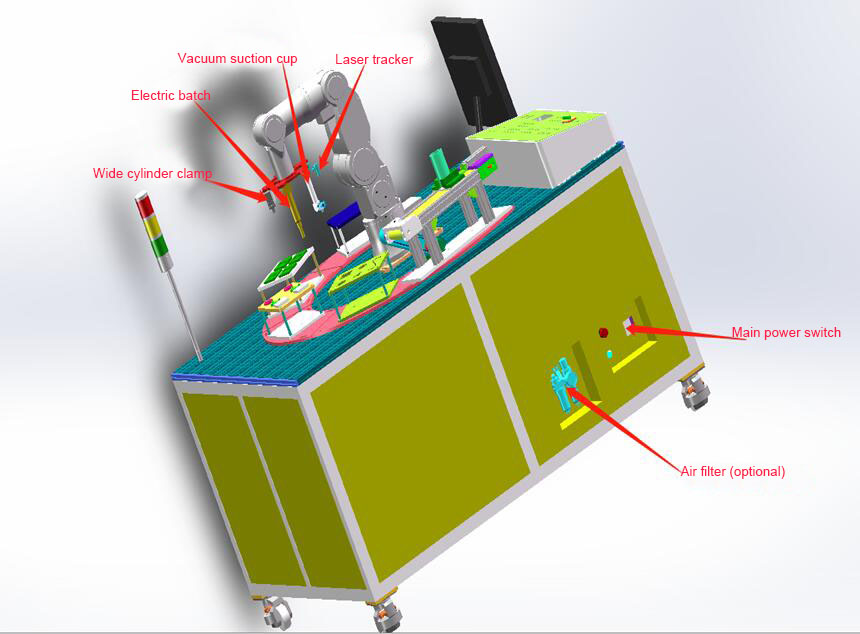
This Die Arbeitsstation für das Lehren und Trainieren von Robotern basiert auf einem Roboter, der mit entsprechendem modularem Peripheriezubehör ausgestattet ist, hauptsächlich einschließlich: Industriemontagelinie, Palettieren Handhabung, Schweißschienenmodul, Materialklemmung, Positionierstift, Vakuumsauger und Erkennung.
Drittens: Anweisungen für jedes Funktionsmodul (1)
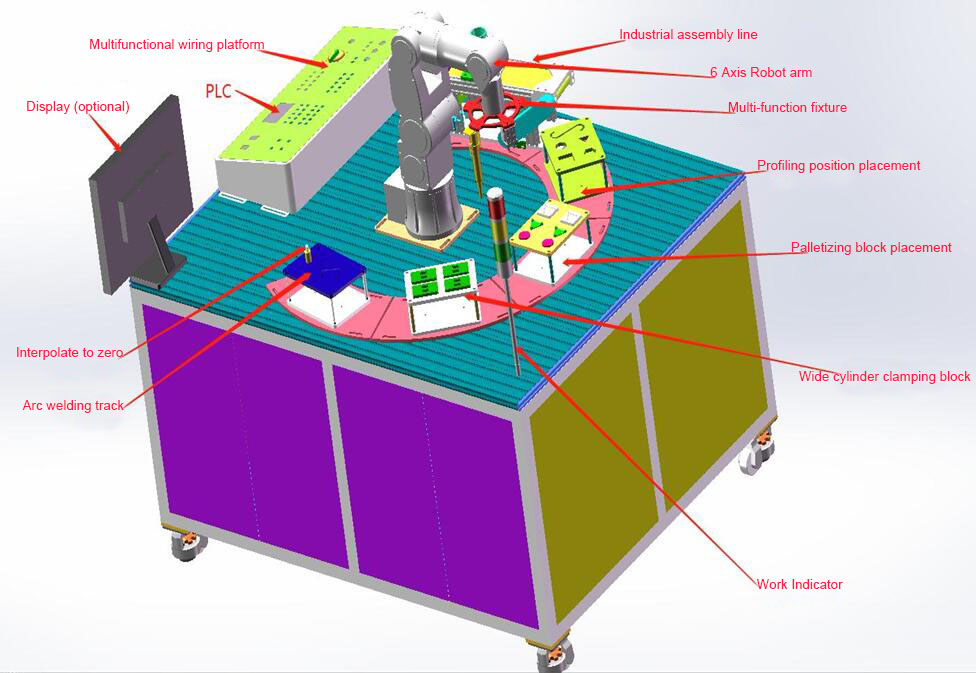
Anweisungen für jedes Funktionsmodul (2)
Viertens: Beschreibung des Aktionsflusses jedes Funktionsmoduls
4.1 Multifunktion Vorrichtung

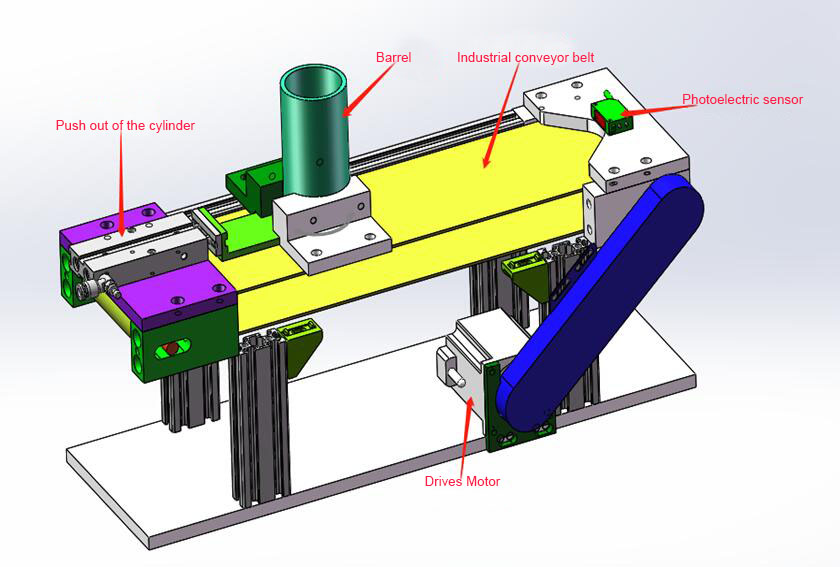
4.2: industrieller Übertragungsriemen
Betriebsprozess Beschreibung: der zylinder drückt den runden block und fällt auf das Förderband, das Band überträgt den runden Block in die vordere Prallposition, der Sensor erkennt, dass der runde Block vorhanden ist und sendet ein Signal an die SPS und die SPS Steuert den Riemen, um die Getriebebewegung zu stoppen. Bewegen Sie sich zum oberen Rand des runden Blocks und nehmen Sie es.
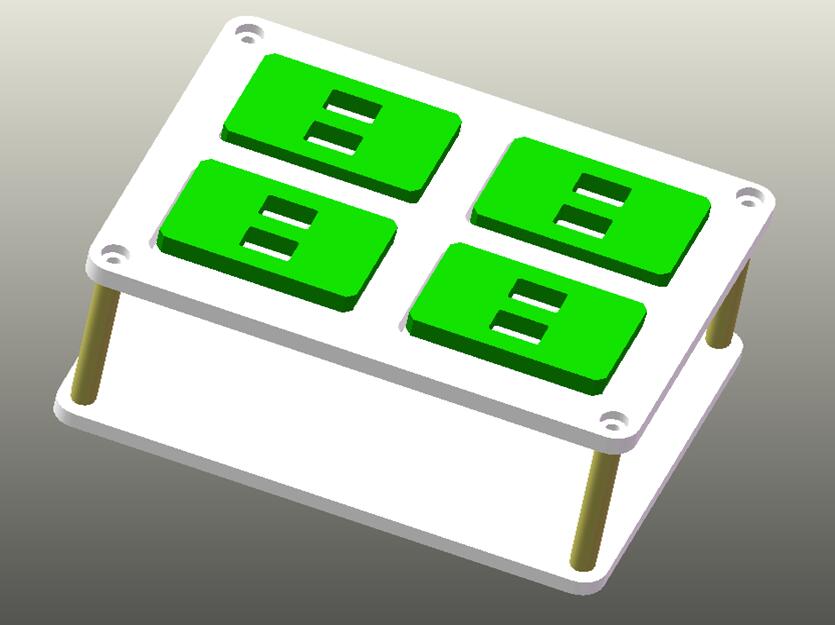
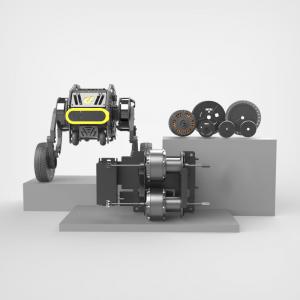
4.3: Palettieren Plattform
Betriebsprozess Beschreibung: Der Vakuumsauger saugt das Dreieck in das Quadrat Block. dann den Kreis in saugen das Dreieck und bringen Sie es dann wieder in die ursprüngliche Position
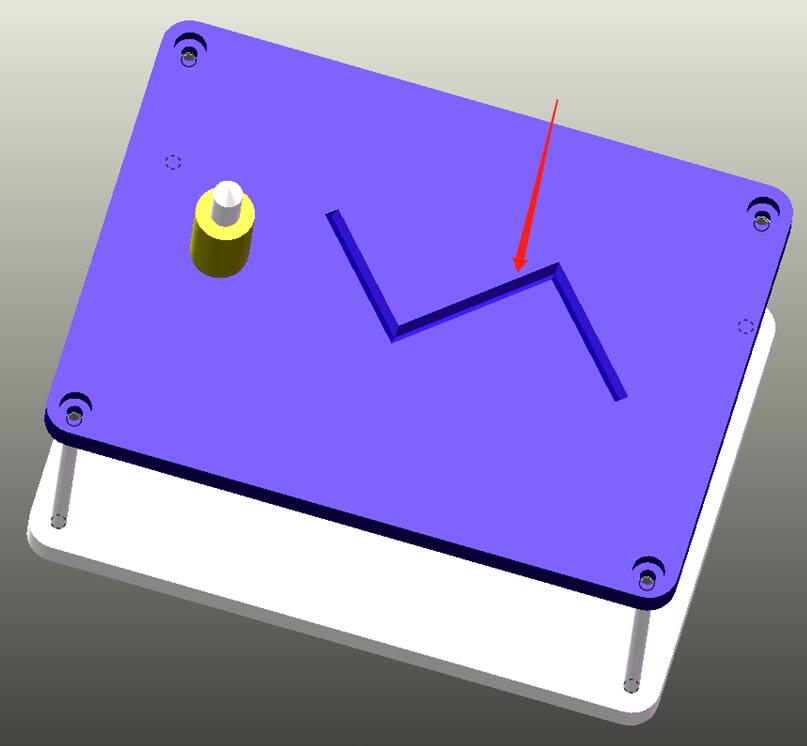
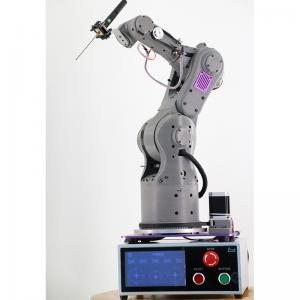
4.4: Simulation von Nadel- und Lichtbogenschweißbahnen
Aktionsablauf Beschreibung: Der Manipulator bewegt die Lichtbogenschweißsimulationssäule (Laser Zeiger) zum Z-förmigen Flugbahn, und der Manipulator steuert die Säule, um entlang der Flugbahn zu gehen.
4.5: Würfel greifen
Aktionsablauf Beschreibung: Der Roboter bewegt den breiten Zylinder Greifer zum oberen Rand des Blocks, senkt den Block ab und klemmt ihn an die angegebene Position.
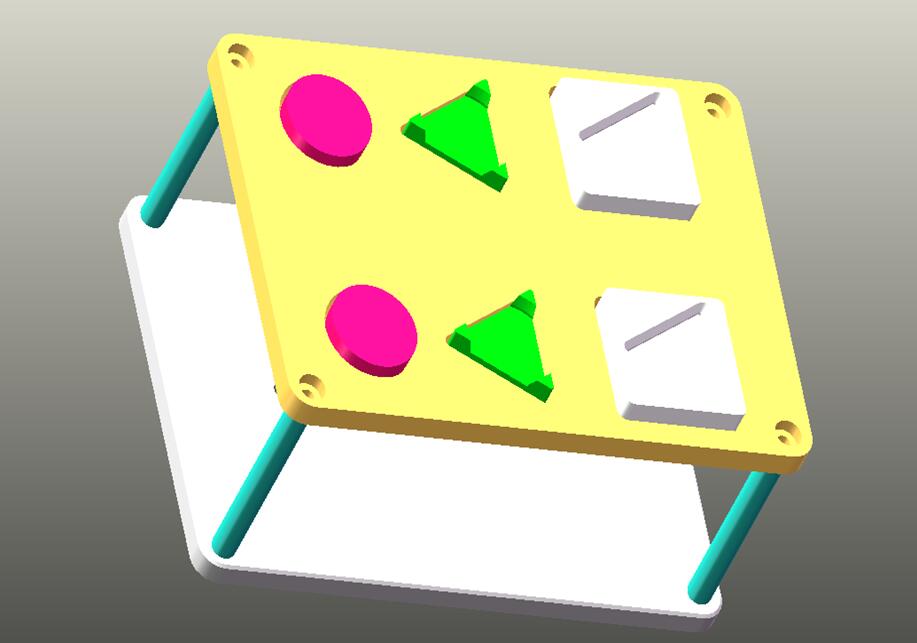
Fünftens: Tastenbeschreibung
Not-Aus: Steuern Sie den Roboter zum Stoppen (drücken Sie zum Stoppen, schalten Sie ihn ein und drücken Sie die Starttaste, um dem Programm zu folgen.) Leistung: Steuerung der Roboterleistung . Start: Steuern Sie den Roboter so, dass er sich gemäß dem Programm bewegt. Null Rückgabe: Steuern Sie den Roboter, um zur programmierten Nullposition zurückzukehren

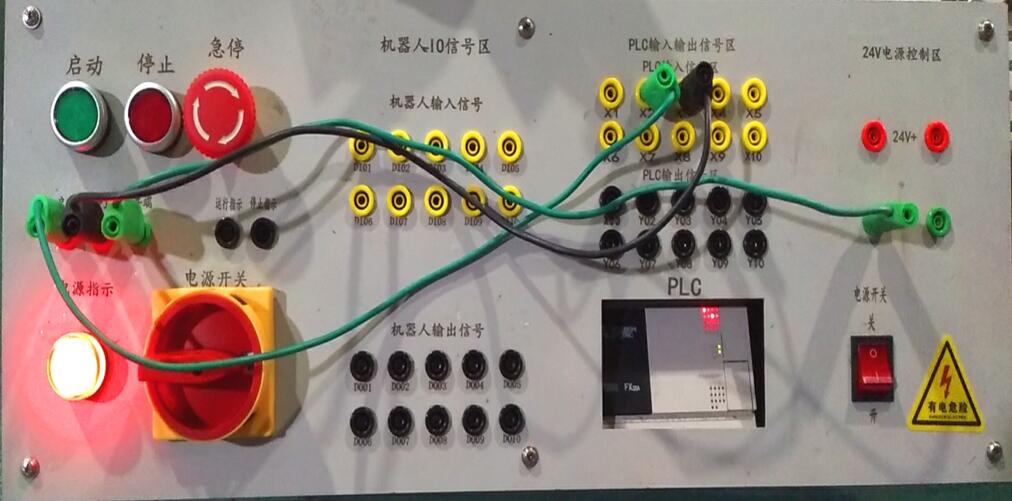
Sechstens: Beschreibung der Steuerplatine
über diese Steuerung die Kommunikation zwischen dem Roboter und der SPS kann leicht realisiert werden, und gleichzeitig können die Verdrahtungsmethode und die Fähigkeiten intuitiv verstanden werden Durch die Verbindung verschiedener Eingabepunkte kann der Aufbau verschiedener Einstellungen schnell realisiert werden, was bequem zum Lernen und sicher ist.
Siebtens: Reparatur und Wartung
Eins: Bitte schalten Sie die Hauptstromversorgung aus, bevor Sie das Gerät reparieren. Laien sollte Öffnen Sie nicht die Power Box.
Zwei: Bitte reinigen Sie die Arbeitsfläche und schalten Sie die Hauptstrom- und Luftquelle nach jedem Gebrauch aus
Drei: Achten Sie vor dem Betrieb des Geräts auf die Umgebung im Roboter Bewegungsradius zur Vermeidung von Sicherheitsunfällen!



Der 6-Achsen-Roboter unterstützt PC, Mobiltelefon, Programmierhandgerät, Sprache, APP und andere intelligente interaktive Steuerungsmethoden.
Der 6-Achsen-Lernroboter TRE06P kann in der Oberschule und in der Robotertechnik-Ausbildungsschule eingesetzt werden.

Der TRE500S Körpergelenk besteht aus hochfestem Aluminium, um die Maschine zu gewährleistenhohe Festigkeit, hohe Geschwindigkeit, hohe Genauigkeit und hohe Stabilität

EDU Roboter Anwendungen: kommerzielle Roboter, Lehrroboter (Lehrroboter für Universitäten, Mittelschulen und Grundschulen), kollaborative SechsachsenRoboter, Fotokameraroboter, Schönheits- und Körperroboter, Milchteeroboter, Autoteile, Aufzugsteile, Werkzeuge zur Inspektion von Autoteilen, Präzisionshardware, Zubehör für medizinische Geräte usw.

Anwendungen umfassen CNC Bearbeitungszentren, KMG Messzentren, CNC Drehmaschinen, Drahtschneiden, Fräsmaschinen, Schleifmaschinen und andere Geräte und können je nach Kundenwunsch mit verschiedenen Oberflächenbehandlungen verwendet werden

Hauptprodukt Anwendungen: kommerzielle Roboter, Lehrroboter (Lehrroboter für Universitäten, Mittelschulen und Grundschulen), kollaborative SechsachsenRoboter, Foto- und Videoroboter, Schönheits- und Körperroboter, Milchteeroboter, Autoteile, Aufzugsteile, Werkzeuge zur Inspektion von Autoteilen, Präzisionshardware, Zubehör für medizinische Geräte usw. .

Hauptprodukte kommerzielle Roboter, Lehrroboter (Lehrroboter für Universitäten, Mittelschulen und Grundschulen), kollaborative SechsachsenRoboter, Foto- und Videoroboter, Schönheits- und Körperroboter, Milchteeroboter, Autoteile, Aufzugsteile, Autoteileprüfwerkzeuge, Präzisionshardware, Zubehör für medizinische Geräte usw.

TR5-850 ist eine 4-Achse vertikal Multi-Joint Roboter mit einer effektiven Stanzlast von 5kg. Es kann sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen und können je nach Kundenfutter fünf oder sechs Achsen anpassen. Das TR5-850 Das Produkt ist leicht zu verstehen und hat eine solide Struktur, um den Anforderungen der Kunden für Produktdiversifizierung, hohe Effizienz und Produktproduktion zu erfüllen.

TRE5-8CO ist ein vertikaler 6-Achsen-Mehrgelenk-Cobot mit einer Nutzlast von 5 kg. Es kann sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen und kann fünf oder sechs Achsen nach Kundenwunsch anpassen. TRE5-8CO Cobot ist leicht verständlich und hat eine solide Struktur, um die Anforderungen der Kunden nach Produktdiversifizierung, hoher Effizienz und Produktproduktion zu erfüllen.

Eigenschaften des 3D-Elektronenmikroskops TVN-3D9000: * Hochwertiges optisches System * HD-Objektiv * Auswahl mehrerer Ziele * Stereoskopische 3D-Bildgebung * Hochpräzise Messung * Qualitätssicherung
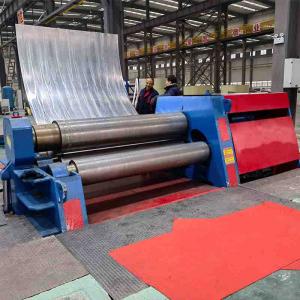
CNC 4-Rollen-Plattenwalzmaschinen-Anwendungen: Diese Maschine eignet sich zum Biegen und Umformen von Metallplatten. Sie kann runde, bogenförmige und konische Werkstücke in einem bestimmten Bereich walzen. Es hat die Funktion, das Ende der Platte vorzubiegen, die verbleibende gerade Kante ist klein und die Arbeitseffizienz ist hoch. Es kann auf dieser Maschine verwendet werden. Grobes Richten von Blechen. Es ist weit verbreitet in der Erdöl-, Chemie-, Kessel-, Schiffbau-, Metallstruktur- und Maschinenbauindustrie.

Roboter Anwendungen: ——Material Handhabung und Palettierung größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung.

Roboter Eigenschaften: großer Arbeitsraum stabile Leistung schnell rennen gute allgemeine Leistung modularer mechanischer Aufbau

springende Stelzen wird hauptsächlich durch eine flache Feder definiert, die auf gesteuert wirdVerformung, so dass das Ergebnis eine gerade Bewegung relativ zum Boden ist Hauptmaterial: Aluminiumlegierung, technischer KunststoffFrühling: Fiberglas;

Die kleinen Modelle der MOTOMAN-GP-Serie zeichnen sich durch eine hohe Bewegungsgeschwindigkeit und Flugbahngenauigkeit aus und verbessern so die Produktionsleistung vor Ort weiter. Gleichzeitig bietet Yaskawa optionale Konfigurationen an, die für den Lebensmittelbereich und Umweltbeständigkeitsstufen geeignet sind, um Ihre Produktion zu schützen.

Anti-Drohnen-Gerät ist für die Flughafenkontrolle, öffentliche Sicherheit ausgelegtKontrolle usw.

Ausgestattet mit einem automatischen L4-Wasseroberflächen-Fahrsystem kann das manuelle / automatische Fahren unabhängig voneinander umgeschaltet werden, was ein neues Tourerlebnis bringt. Es eignet sich für Wasseroberflächenbesichtigungen, Verkehrsverbindungen, Forschungserfahrungen, Wasser-Nachmittagstee und andere Szenarien und fördert die rasche Realisierung von Wassertourismus und Wassertransport. Digitalisierung und Intelligenz.

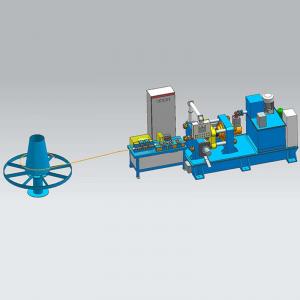
ADTECH 12 Achsen CNC Die Maschinensteuerung des Federmachers ist für den Aufbau der Federmaschinen ohne Nocken ausgelegt

Roboterarm Anwendungen: ——Spraying und schneiden Stabilisierung und Verbesserung der Schweißqualität und Gewährleistung ihrer Gleichmäßigkeit; Verbesserung der Produktivität, kontinuierliche Produktion 24 Stunden am Tag; Verbesserung der Arbeitsbedingungen der Arbeitnehmer und langjährige Arbeit in schädlichen Umgebungen;die Anforderungen an die Arbeitnehmer verringernBedienung Fähigkeiten; Verkürzung des Zyklus der Produktänderung und des Produktaustauschs und Verringerung der entsprechenden Investitionsausrüstung; kann Batch-Produktschweißen realisieren;Platz sparen.

M800 Serienprodukt Merkmal : * 50 % Reduzierung von Volumen und Verdrahtungszeit * 30 % Energieeinsparungen * 3,2 kHz Reaktionsgeschwindigkeit

Elektronenmetallographisches Mikroskop TVN-MT60 mit den Hauptmerkmalen: Die Atmosphäre ist stabil und der Betrieb flexibler. Es integriert verschiedene Beobachtungsfunktionen wie Hellfeld, Dunkelfeld, polarisiertes Licht und DIC-Differenzinterferenz, die entsprechend den tatsächlichen Anwendungen ausgewählt werden können.

Ähnlich wie deine echte Freundin Individuelle Anpassungsmöglichkeiten bei Körperform, Gesichtsausdruck und Augenfarbe usw. Warm Körperfunktionen Fließend Englisch und Chinesisch

Eigenschaften der E-Zigarette: *Standardtestumgebung: Temperatur: -5—42℃ *Anwendung: Ziehen Sie das Silikon des Zerstäubermundstücks nach außen, um den Rauchauslass freizulegen. Entfernen Sie dann den unteren Aufkleber und beginnen Sie mit der Verwendung. (Wenn die abgesaugte Rauchmenge gering ist, füllen Sie die Batterie bitte rechtzeitig auf.)

Der mobile mobile kollaborative Roboter selbst ist ein Bediener, der sich autonom bewegen kann, Führen Sie die Aufgaben mehrerer verschiedener Stationen in der Produktionslinie rechtzeitig ausmit Mecanum Radantriebsmodus, realisiere 360 ° Bewegung in jede Richtung und kann flexibel in einem kleinen Arbeitsraum effektiv arbeiten Verbesserung der Standortauslastung und Produktion Effizienz. durch die Abstimmung von Rich-End-Fixtures und visuellem Wissen verschiedene Geräte, die das Greifen, Zusammenbauen, Sortieren, Laden und Entladen, Bewegen, Handhaben, Sehen realisieren können Erkennung und andere Funktionen sind genauer, stabiler und effizienter

AI C. offnee Roboter Spezifikationen: Roboter Gewicht: 72kg Basis Größe: 650mm im DurchmesserBewegung Reichweite: 750mm Klemmung Typ: Mechanische parallele KlemmungMaximale Bewegungsgeschwindigkeit des Ende des Roboters Arm: 1m / s Wiederholen Sie die Positionierung Genauigkeit: ± 0,1mm Grade von Freiheit: 12 + 2 Spannen Nutzlast: Unten 3kg Eingang Spannung: AC 100-240V Schnittstelle: RJ45X2, HDMIX1, USBX4 Programmierung Methode: PC / mobile Grafische Schnittstelle / Python / C ++ / ROS Schnittstelle mit niedriger Ebene

Die hohe Konfiguration unseres Delta-Roboters gewährleistet mit hoher Leistung und hoher Kostenleistung: *Durch die Verwendung von aus Japan importierten Panasonic- Servomotoren. *durch hochpräzise Planetengetriebe. *Nutzlast von 1kg bis 15kg. *Arbeitsdurchmesser von 350 mm bis 1400 mm.

Vakuum-Entgasungsmischer Beschreibung: Die Maschine rotiert und kreist, gekoppelt mit einer leistungsstarken Vakuumpumpe, und vermischt Materialien innerhalb von Sekunden bis Minuten gleichmäßig. Mischen und Vakuumieren erfolgen gleichzeitig. Ausgestattet mit verschiedenen Klammern und Bechern kann sie Materialien von einem Dutzend Gramm bis zu 1500 Gramm mischen.

kugelsicheres Glas kann von zugelassen werdendas Waffenmodell unten: 1, M14 automatisches Gewehr / 7,62 mm NATO-Kugel 2, F56 MaschinenmaschineWaffe / 7,62 mmStahlkernkugel 3, F79 LichtmaschineWaffe / 7,62 mmStahlkernkugel 4, F54 Pistole / 7,62 mmStahlkernkugel

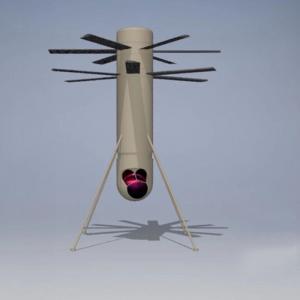
Faserlaser-Hindernisentferner der TR-Serie: Aktionsdistanz: 10-650 Meter Aktionsobjekte: Drachen, Drachenleinen, Werbetücher, Sonnenschutznetze, Baustaubnetze, transparente Folien, Agrarfolien und andere nichtmetallische Fremdkörper, Vogelnester, Hornissennester, große Baumhindernisse und schwer zu überwindende Hindernisse. Gesamtgewicht der Maschine: Host 27kg (inkl. Sender), Batterie 21kg

Kapazität: 40-50pcs / min Leistung: ungefähr 11kw Gewicht:ungefähr 2000Kg Produktgröße Fehler: ± 1 mm (ohne Rohmaterial Fehler)

Erwachsenenmodell MOONJUMPER: Aluminiumlegierung Fram mit einem halben Plastikpedal; bewegliche Pedale;Körpergewicht laden : 50-70 kg, 70-90 kg; Farbe: Schwarz, Blau, Gelb, Grau Verpackung:1 Paar / KartonverpackungNettogewicht: 7KG

Roboter Mechanical Parameter: Insgesamt Maß: 1150 (l) x 730 (w) x 1138 (h) net Gewicht: 280kg Elektrische Parameter: Batterie Spannung: 48V; Batterie Kapazität: 130a Arbeitszeit für eine Single Ausdauer: 6-8h Batterie Typ: Lithium BatterieLeistung Parameter: Arbeiten Geschwindigkeit: Max: 1.3m / s, Vorschlag: 0.6m / s Reinigung Effizienz: 2300㎡ / H (TYP1288) Reinigung Breite: 552mm Pinsel Typ: DoppelwalzbürsteTank Volumen: 120l (intern Zirkulation) Arbeiten Geräusche:

Der weltweit leichteste aktive, hüftgestützte Exoskelett-Roboter mit 20 kg Gewicht ist ein kleines Gerät mit großer Unterstützung, gutem Preis-Leistungs-Verhältnis, hoher Flexibilität und bequemem Tragekomfort. Derzeit sind nur Prototypen für den Testeinsatz verfügbar, doch er hat bereits begeisterte Aufmerksamkeit ausländischer Kunden erregt und Bestellungen erhalten. Er ist vielseitig in Logistik, Industrie und Pflege einsetzbar.

Hochwertige AC-Servos für den Aufbau oder die Nachrüstung von Robotern CNC Maschinen etc. OEM verfügbar für unsere Kunden, AC-Servotreiber, AC-Servocontroller

【Modell】TR1005A-099 【Aktionstyp 】Mehrgelenktyp 【 Nennlast】5kg 【Bewegungsradius】990mm 【Gewicht】55kg 【Anzahl der Achsen】6 Achsen

Holographische Freundin 3D Spezifikation: Modell: Tr-aiera Marke: OEM Material: Legierungsfarbe Klassifizierung: Goldene exklusive Ausgabe. Kompatibel Plattform: Android ios. SMART Typ: ai virtuelle freundin. Macht W: 15 W. Produkt Nettogewicht (kg): 2.1 kg Produktgröße (mm): 265x265x160 Menkt Intelligente Garantie Periode: 12 Monate

TR600B vierachsig SCARA Industrieroboter Der Roboter ist ein Mehrgelenk vierachsig Roboter mit vollständig unabhängigen EigentumsrechtenEs verwendet eine Hochleistungssteuerung zur Steuerung des Roboters, um eine Hochgeschwindigkeitspunktbewegung, eine räumliche lineare Interpolationsbewegung, eine räumliche Bogeninterpolation und andere Funktionen zu erreichenEs eignet sich für den Transport, verschiedene industrielle Anlässe wie Be- und Entladen, Punktschweißen, Kleben usw.
Stauchen von Phosphorbronzekugeln Maschinenparameter : Stauchen von Phosphorbronzekugeln Durchmesserbereich: φ50-φ60mm Extrusionskraft: ≥120t Produktionseffizienz: ≥8 Kapseln/Minute Gesamtgewicht der Ausrüstung: ≥10t Ertragsindex: ≥99,9% Stromverbrauch: ≤45Kw.h /T

Die intelligente umfassende Verwaltungsplattform ist das Versand- und Verwaltungszentrum sowie das Datenzentrum unbemannter Reinigungsfahrzeuge, das den Betrieb unbemannter Reinigungsfahrzeuge verschiedener Projekte überwachen und global verwalten kann. Es erleichtert Benutzern nicht nur die tägliche Wartung und Verwaltung der Geräte, sondern verbessert auch die Visualisierung, Digitalisierung und Intelligenz der Reinigungsbereichsabläufe weiter und bringt einen qualitativen Sprung auf die Ebene des Reinigungsmanagements.

Der kollaborative Roboter aubo-i16 hat eine Nutzlast von 16 kg. max. Länge 1130.5 mm, max. Reichweite 967.5 mm. große Nutzlast, kleine Größe.

3D-Drucker Modell: TR-6610D Anwendbar RAW Materialien: pla Druckgenauigkeit 0,1mm Formmethode FDM Schichtdicke 0,05-0,6 mm Positioniergenauigkeit 0,001 mm Heizplatte Temperatur 110 ° C Düsentemperatur 0-260 ° C Bewegungsgeschwindigkeit 30-150mm / s Tatsächliche Leistung 350W + Eingangsspannung 220V (V) After-Sales Service 1 Jahr Garantie

src-basierter automatischer Laser-SLAM-Stapler SFL-CDD20, ausgestattet mit Core-Controller der SRC-Serie, kann Paletten, Gabelwaren genau identifizieren, und effizient arbeiten; und verwendet Laser-SLAM-Navigation, kein Reflektor, einfach zu implementieren; Rumpf 360 ° umfassender Schutz + 3D-Hindernisvermeidung zur Verbesserung der Sicherheit des Roboterbetriebs; die Hubhöhe kann angepasst werden, und unterstützt einen maximalen Hub von 6 m,, was eine "Stapelwaffe" in der Fabrik ist; Die maximale Belastung beträgt bis zu 2000 kg, Geeignet für große Fabriken oder Lagerhäuser. Lasthandhabung, Stapel- und Palettierungsszenarien

Der Delta-Roboter ist eine klassische Parallelroboter-Konfigurationes hat die Eigenschaften von dreidimensionalem XYZ Verschiebung und Drehung um die z -Achse. Es bietet die Vorteile einer hohen Geschwindigkeit, einer guten Genauigkeit, einer hohen Zuverlässigkeit, einer hohen Benutzerfreundlichkeit und geringer Wartungskostenes ist weit verbreitet in Hochgeschwindigkeitssortier- und Verpackungsfeldern
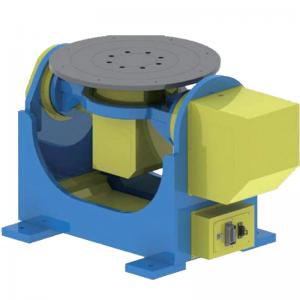
2-Achsen-Drehtisch für Schweißroboter * Nutzlast von 200kg bis 1000kg * Tischdurchmesser von 400 mm bis 600 mm * Kann angepasst werden.

Modell: TVN-SmartGo Typ: Smart Vision Inspektionskamera Auflösung: 1600 x 1400 Bildfrequenz: Farbe/Schwarzweiß Netzwerkschnittstelle: 100 Mbit/s Videoschnittstelle: HDMI IO-Schnittstelle: IO-Schnittstelle, RS232, Stromschnittstelle USB-Schnittstelle: 2 Speichermethode: U-Disk-Speicher

Die Anwendung des Videomikroskops im Produktkontrast Inspektion: * Grafik Overlay * Mikroskop * HDMI Kamera * Video Mikroskop

Das intelligente digitale Ultraschallschweißsystem wird hauptsächlich in den Bereichen Gesichtsmaskenmaschine, Herstellung medizinischer Schutzkleidung, Windeln Vlies eingesetztTaschenherstellungsmaschine, Vlies Kleidungsnähte, Markenschneiden und Schneiden von Nylonbändern usw.

Inspektion Vierbeinig Roboterhund Anwendungen: Aufgrund der Anwendungsanforderungen in komplexen und gefährlichen Umgebungen bietet es intelligente Lösungen für Anwendungsszenarien wie Firefighting und Rettung, Anti-Terrorismus und Anti-Explosion.

Einstiegsmobiler Roboter-Controller: SRC-880 Der kostengünstigste AMR-Controller, der beste Partner für Differential AMR.

Anforderungen an die Futtermittelverpackung: Taschenform Benutzer bereitgestellt Nettogewicht Einzelpaket 25-50 kg Verpackungskapazität für einzelne Geräte 280-380 Säcke/Stunde

Unbemannter Lieferroboter: Das leistungsstarke unbemannte Lieferfahrzeug TR-UB003 der zweiten Generation, das speziell für offene Straßen und die Zustellung an Campus-Terminals entwickelt wurde, verfügt über autonome Fahrfunktionen der Stufe L4 und kann die letzten fünf Kilometer der Zustellung an den Benutzer bewältigen.

ROKAE CR12 – 12 kg, 6-Achsen, 1434 mm Nutzlast 12 kg Erreichen 1434 mm DOF 6-Achsen IP IP67 Marke: ROKAE | Partner: TROY Supply

leicht zu bedienen: kraftfreies teching reduziert effektiv die Auspackzeit und die Lernkosten.tragbarer PC,freundliche Mensch-Maschine-Bedienoberflächeerleichtert die Verwendung des Roboters. Modularität: All-in-One-Modul aus Untersetzungsgetriebe,Motor,Encoderund Antrieb,, das praktisch für eine schnelle Demontage ist. schneller Einsatz: 10 kg Nennlast bei 36 kg Gewicht.leichte Installation und flexibler Einsatz.

Unter Berufung auf ein wissenschaftliches Managementsystem, bequeme Transportbedingungen, starke Produktionskapazitäten, Testmethoden und ein perfektes Vertriebsnetz stellt unsere Fabrik eine Reihe von Produkten mit hoher Qualität, niedrigem Preis und schönem Aussehen her, um verschiedenen Industrie- und Bergbauunternehmen zu dienen. Hauptgeschäft: eine Vielzahl von hochfesten Ketten; Hebemaschinen; Fördermaschinen; Mine Support-Produkte; Kranteile und Wartungsdienste Schiffskette, grüne Dekorationskette, Edelstahlkette, Becherwerk-Hebezeugkette, Kettenhaken, Trichter, Kettenrad, Plattenkette und anderes Zubehör, Fördermaschinen-FU-Förderzubehör, Kettenförderzubehör, Kratzer Plattenförderzubehör , Schlackenförderer, Schlackenentfernerzubehör, Grubenstützbolzen, Ankerplatten, W-Stahlgurte, Ankerseile, Verankerungsmittel und andere unterstützende Produkte. Die oben genannten Produkte werden verwendet in: Hebe-, Metallurgie-, Kohle-, Erdöl-, Baustoff-, Zement-, Strom-, Chemie-, Schiffbau-, Transport- und Umweltindustrie. Nicht standardmäßige Produkte können an die Bedürfnisse des Benutzers angepasst werden.

TR-X9 ist ein lüfterloser und vollständig aus Aluminium gefertigter kleiner PC, der mit 2 LAN- und 2 HDMI-Anschlüssen ausgestattet ist. Das neue 2,5-Zoll-Festplattenschubladendesign ermöglicht eine schnellere Neukonfiguration von SSD/HDD, und der optionale Intel Dual-/Quad-Core-Prozessor liefert eine hohe PC-Leistung. TR-X9 ist eine gute Wahl für einen PC zu Hause/im Büro sowie als Anzeigeterminal für den gewerblichen Einsatz.

Geländegängiger Inspektionsroboter: Es ermöglicht eine autonome Online-3D-Kartierung komplexer Innen- und Außenszenen und wird in den Bereichen Feuerwehr, Strafverfolgung, Fälle, Kohlebergbau, Petrochemie, Sicherheit und anderen Bereichen eingesetzt, einschließlich unbemannter Kartierungsdienste für Anwendungsanforderungen wie unbemannte Kartenerstellung und 3D-Rekonstruktion.

Roboter Anwendungen: ——Material Handhabung und Palettierung größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung.

Einseitige Schleif-/Poliermaschine: Name: Einseitige Kupferplattenpoliermaschine TR- ES50B Maschinengröße: Länge 2450㎜ × Breite 1721㎜ × Höhe 2900㎜ Maschinengewicht: 7500KG.

leicht zu bedienen: Kraftfreie Technik reduziert effektiv die Auspackzeit und Lernkosten.tragbarer PC,freundliche Mensch-Maschine-Bedienschnittstelleerleichtert die Verwendung des Roboters. Modularität: All-in-One-Modul aus Untersetzungsgetriebe,Motor,Encoderund Antrieb,, das praktisch für eine schnelle Demontage ist. schneller Einsatz: 5 kg Nennlast bei 18.5 kg Gewicht.leichte Installation und flexibler Einsatz.

Roboter Eigenschaften: großer Arbeitsraum hohe Wiederholungspositioniergenauigkeit stabile Leistung schnell rennen gute allgemeine Leistung modularer mechanischer Aufbau

Bauchgürtel Merkmale: * intelligente Telefonsteuerung. * EMS-IC-Chip. * 8 Differenzmodus * 50 Ebenen * Autoanschlag um 25 Minuten * eine Taste-Operation.

Der 4-Achsen-Industrieroboter ist zum Palettieren ausgelegtund schwere Teilebewegung

Eigenschaften des Verbundroboters : *Omnidirektionaler Betrieb Vollzeit- und omnidirektionaler mobiler Betrieb, integrierte koordinierte Bewegungssteuerung. *Hybrid-Navigation Unterstützt den Wechsel zwischen freier Navigation (AMR-Modus) und festgelegten Routen (AGV-Modus) zwischen mehreren Punkten. *Hybrid-Targeting Positionierung mit visueller Dual-Radar-Fusion-Erkennung, Andockgenauigkeit +/-5 mm, nicht von dynamischen Umgebungen beeinflusst. *Mensch-Maschine-Betrieb Es kann Fußgänger und spezielle Szenenmarkierungen erkennen, verfügt über eine 360-Grad-Umgehung visueller Hindernisvermeidung und kann den Arbeitsbereich des Roboterarms sicher erkennen, um die Sicherheit zu gewährleisten. *Flexible Planung. Es kann mit einem Dispositionssystem eines Drittanbieters verbunden werden, um die Zusammenarbeit mehrerer Maschinen in gemischten Feldern durchzuführen und den Dispatch über die Geräteverknüpfung zu unterstützen. *Hebe-Fußmatten Heben Sie die rutschfeste Gummi-Bodenmatte an, um die Parkstabilität um +/- 0,5 mm zu erhöhen.

Online-Wärmebildkamera: TR-460TC Es handelt sich um eine leistungsstarke und hochpräzise netzwerkbasierte Wärmebildkamera mit einem ungekühlten Infrarot-Fokalebenenarray-Detektor. Verschiedene Objektive stehen zur Verfügung, die klare und genaue Infrarotbilder sowie Temperaturmessungen ermöglichen. TR-460TC Es unterstützt verschiedene Kommunikationsprotokolle wie Modbus TCP, ONVIF und GB28181 und wird mit professioneller Infrarot-Temperaturanalyse-Software und einem SDK geliefert. Dank seiner geringen Größe und des niedrigen Stromverbrauchs lässt es sich problemlos in Anwendungen der Bildverarbeitung, Energietechnik, des Schienenverkehrs und der industriellen Automatisierung integrieren.

Der universelle Industrieroboter ist am Ende von factory. für alle Arten von Anwendungen flexibelwie Kommissionieren und Platzieren, Polieren, Bohren und Sprühen usw.

Der kollaborative Robotermotor wurde von unserem Unternehmen speziell für die Roboterindustrie, Energieinspektionsroboter, Spezialroboter und bionische Roboter entwickelt. Der einfache strukturelle Aufbau des kollaborativen Robotermotors wird mit den Robotergelenken kombiniert, um eine geringe Größe und hohe Präzision zu erreichen. Es verfügt über eine überlegene Leistung bei niedrigen Geschwindigkeiten, eine hohe Leistungsdichte, ein schnelles Ansprechverhalten und geringe Drehmomentschwankungen, wodurch die Vibrationen beseitigt werden, die von den Robotergelenken beim Betrieb bei niedriger Geschwindigkeit erzeugt werden. Die Leistung des von unserem Unternehmen hergestellten kollaborativen Robotermotors kann ähnliche Produkte eines bestimmten Unternehmens in den USA ersetzen.

ADTECH 6-Achs-Fräsmaschinensteuerung berühmte Marke in China CNC Industriebereich einfache Bedienung und mehrere Funktionen Technischer Online-Support

Installationen: Größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch; Maximaler Durchsatz bei Hochgeschwindigkeitsleistung; Lange Arbeitszeit; Feste Automatisierung; Roboteranwendungen: Wie Schleifen und Polieren, Schneiden, Schleifen, Entgraten, Reinigen, Polieren, Wasserschneiden und andere Verarbeitungsfunktionen.

Merkmale des Punktschweißroboters TR10210A-265: Nennnutzlast: 210 kg. Arbeitsbereich: 2658 mm. Anzahl der Steuerachsen: 6 Wiederholgenauigkeit der Positionierung: ±0,06 mm. Installationsmethode: Formale Installation. Schutzstufe (Handgelenk): IP65.

Wir bieten Videomikroskopielösungen, die die industrielle Inspektion einfacher, bequemer und effizienter machen. Gleichzeitig sind ergonomische Aspekte wie Bedienerkomfort und Wafersicherheit besonders wichtig für die erfolgreiche Integration von Mikroskopen in Produktionslinien, und wir konzentrieren uns auf die Lösung dieser Probleme. Das Unternehmen liefert neue Ideen, Lösungen und technische Unterstützung für eine Vielzahl von Branchen, darunter Halbleiterwafer, Flachbildschirme und elektronische Geräte.

Wir sind führend in intelligenter Innovationstechnologie und -anwendung und sind die ersten in China, die eine vollständig autonome Inspektion von Umspannwerken durch vierbeinige Roboter realisieren.Unser unabhängig entwickelter vierbeiniger Roboterhund wurde in Kraftwerken, Fabriken und Pipelineinspektionen eingesetzt , Notfallrettung, Brandermittlung, zukünftige wissenschaftliche Forschung und andere Anwendungsumgebungen. Es hat die Asienspiele in unterirdischen Pipelines versorgt, am Singapore National Grid-Projekt teilgenommen und an Notfalleinsätzen, Erdbebenhilfe und Explosionsaufklärungsübungen teilgenommen. Wir führen derzeit eine langfristige und intensive Zusammenarbeit mit Branchenriesen wie State Grid, China Southern Power Grid, Baosteel Co., Ltd. und Fluke.

MIG Schweißroboter für Stahl, Edelstahl. Kompatibel mit 1 / 2 Achse Rotator Tabelle. Laser scheint das Tracking-System für diesen Roboter verfügbar zu sein!

sechs Freiheitsgrade, Gewicht 33.5kg, Belastung 12kg Arbeitsradius 1304 mm Wiederholpositioniergenauigkeit ±0.03mm Höchstgeschwindigkeit 3.2 m/s typische Leistung 500w Schutzart IP54

* Rein Wasserproduktion Kapazität: 4T / H * Länge zum Trocknen Tunnel: 15M * Ofentemperatur: bis zu 140 ℃ * Heizung Leistung: dreiphasig 380V * Steuerspannungsversorgung: einphasig 220V * mechanische Geschwindigkeit: 5-20m / min * installierte Kapazität: 400KW
MIG Schweißroboter für Stahl, Edelstahl. Kompatibel mit 1 / 2 Achse Rotator Tabelle. Laser scheint das Tracking-System für diesen Roboter verfügbar zu sein!

Produkt Anwendungen: * Industrieroboter Vision System * Bildverarbeitungssystem für Industriemaschinen * Inspektion fehlerhafter Produkte * PorductPositionsregler * QC Überprüfung auf Mikroprodukte

Produkt Merkmale: Genauigkeit: 0,1 mmGeschwindigkeit: 40-80 Flaschen / min flaschendurchmesser: 40-100mm Flasche Höhe: 50-300mm

Die Topologie dieser Lösung umfasst im Wesentlichen die Vorbehandlung, UV-Härtung und Reparaturabnahme. Die Vorbehandlung umfasst Geräte wie Rohrleitungsinspektionsroboter, Schneidroboter und Hochdruckendoskope. Diese Geräte prüfen und verarbeiten den ursprünglichen Zustand der Rohrleitung effizient und ermöglichen datenbasierte Entscheidungen für nachfolgende UV-Härtungsreparaturen. Die grabenlose UV-Härtungstechnologie ermöglicht schnelle und präzise Rohrleitungsreparaturen und verlängert so die Lebensdauer der Rohrleitung.

Wafer-Poliermaschine Hochpräzise doppelseitige Schleifpoliermaschine TR-32B Mechanische Abmessungen: Länge 3850㎜ × Breite 2900㎜ × Höhe 3700㎜ Maschinengewicht: 26000KG

Wir liefern gebrauchte Yamaha SMT-Maschinen Wir liefern gebrauchte Fuji SMT-Maschinen Wir liefern gebrauchte Panasonic SMT- Maschinen

Tiny Humanoide Roboter TR-T1-Merkmale:*Höhe: 1200 mm;*Gewicht: 30 kg;*Akkulaufzeit: 2-4 Stunden;*Support Second F & E Project;*Anti-Fall- und automatische Stand-up-Funktion.

T-Shirt-Faltmaschine Modell: TR-61A Eigenschaften. 1. Das Gerät verfügt über eine wissenschaftlich durchdachte Konstruktion, ist benutzerfreundlich und äußerst anpassungsfähig. 2. Die Geräte sind wartungsfreundlich und schnell zu bedienen und zeichnen sich durch einen hohen Grad an technischer Raffinesse aus. 3. Die Geräte können die Faltgeschwindigkeit von Steppdecken im Vergleich zur manuellen Arbeit effektiv erhöhen.

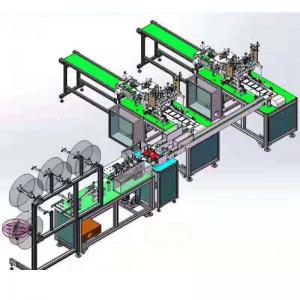
This Maschine ist eine vollautomatische Eins-zu-Eins KF94 (Weidenblatt, fischförmig) Maske Maschine; Das Ladegestell ist mit einer Hauptkörpermaschine und einer Ohrriemenschweißmaschine verbundenDas Ladegestell ist für das Installieren und Fördern von Stoffen verantwortlich, und die Hauptkörpermaschine ist verantwortlich für das Formen und Schweißen des Maskenkörpers und das Ohrband Die Maschine ist für das Schweißen des Ohrbands verantwortlich. Die gesamte Linie übernimmt die SPS, die Touchscreen-Steuerung, das Hauptförderband übernimmt einphasig Motorförderung, Schrittmotor dreht den Film, präzises Getriebe, stabile Steuerung und einstellbare GeschwindigkeitBeim Schweißen wird Ultraschall verwendet, der stabil und effizient ist

AMR-Gabelstapler Spezifikationen: Nenntragfähigkeit (kg) 2000 Kombinierte Ausdauer (h) 6-8 Standardhubhöhe (mm) 3000 Fahrgeschwindigkeit: Voll beladen/unbeladen (m/s) 1,5 Minimaler Wenderadius (mm) 1577 Positioniergenauigkeit (mm, °C) ±10mm ±1

Der 6-Achsen-Roboter ist zum Sprühen vorgesehenEin vollständiges Sprühpaket kann unseren Benutzern zur Verfügung gestellt werden.

*Ausgestattet mit visueller Positionierung, Tiefensichtkamera, Lidar* Präzise Positionierung und Navigation von Wanderrouten, autonome Planung* Zusammenarbeit mit mehreren Maschinen und geordnete Verteilung

Tisch-Metallographie-Messmikroskop TVN-50MINI : Dieses Produkt kombiniert die hohe Vergrößerung eines metallographischen Mikroskops mit den X-, Y- und Z-Dimensionsmessfunktionen eines Bildmessgeräts und ist somit ein multifunktionales Messinstrument mit hochpräzisen linearen Mess- und Beobachtungsfunktionen.

Antrag für Montage: größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung;

FR20 Cobot-Funktionen: Plattformbasierte Produkte mit leistungsstarken, skalierbaren und nachhaltigen Funktionen helfen Kunden dabei, wichtige Knoten zu verbinden, Integratoren und Endbenutzer zu stärken, die Grenzen intelligenter und flexibler Roboteranwendungen in verschiedenen Szenarien zu durchbrechen, eine tiefe Integration mit Szenarioanwendungen zu erreichen und nicht standardmäßige und nicht standardmäßige Anwendungen zu lösen Flexible Pain Points reduzieren die Nutzungsschwelle für Industriekunden. Nutzlast: 20kg. Arbeitsradius: 1854 mm Wiederholpositionierungsgenauigkeit: ± 0,1 mm

Eigenschaften des Kaffeemaschinenroboters: Der Kunde wählt das Kaffeegetränk auf dem Touchscreen aus und sendet nach der Auswahl die Bestellung ab. Unser Coffee Cobot-System erhält sofort die Bestellinformationen und der Coffee Robot beginnt mit der Kaffeezubereitung entsprechend den Bestellinformationen.

ABB KUKA Yaskawa Fanuc etc. Industrieroboterarm 4 Achsen und 6 Achsen 6kg bis 2000kg Nutzlast Innerhalb von 5 Jahren

Leicht zu bedienen: Force-free teching reduziert effektiv die Debugging-Zeit und die Lernkosten, eine benutzerfreundliche Oberfläche für eine viel einfachere Verwendung. Modularität: All-in-One-Modul aus Untersetzungsgetriebe, Motor, Encoder und Antrieb, das für eine schnelle Demontage geeignet ist. Schnelle Bereitstellungment: 5 kg Nennlast bei 18,5 kg Gewicht. Leichte Installation und flexibler Einsatz.

ADT-8940A1 ist hoch kostengünstig pci-bus Bewegungssteuerung Karten. es unterstützt linear, arc. Interpolation.40 Kanaleingang und 16 Kanal Digtial Ausgabe Port. Es kann eine Anwendung für Schneidemaschinen, Graviermaschinen und Lasergeräte sein
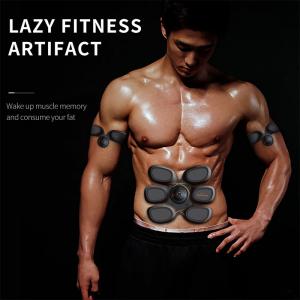
Bauchgürtel Merkmale: * intelligente Telefonsteuerung. * EMS-IC-Chip. * 8 Differenzmodus * 50 Ebenen * Autoanschlag um 25 Minuten * eine Taste-Operation.

Windelmaschine für Erwachsene: kundenspezifische Spezifikation; 3-Wellen-Antrieb/Vollservo, Zahnriemen und Flachriemen sind importierte Produkte, und alle Schlüsselteile verwenden importierte Lager. Deutschland Automatisches Bahnführungssystem BST (optional).

Terminator 2Modell T800 rotes Licht der Augen T2 SammlungKein Entfernungsspan im Kopf !

Schutzhandschuh-Tauchmaschine für verschiedene Materialien (Naturkautschuk, Butyronitril, PVC). PU-Härtungsprozess mit humanisiertem Design, angemessener Prozess, automatisches Balance-Füll-Klebersystem, stabile Produkte , gleichmäßige Beschichtungsdicke, Länge, kein Aufhängepunkt, Temperaturgleichmäßigkeit , hohe Leistung, einfaches Abziehen des Handschuhs usw.

Anti-Drohnen-Gerät ist für die Flughafenkontrolle, öffentliche Sicherheit ausgelegtKontrolle usw.

WIG Schweißroboter ist für dünne Bleche wie Aluminium ausgelegtoder dünner Stahl.

Bodenreinigung Roboter: Es istVerlassen Sie sich auf die autonome Positionierung eines ausgereiften Slam-Roboters und Navigationstechnologie durch das Kollisionsvermeidungsdesign von Lidar + 3D-Kamera, präzise Navigation und Positionierung, Ersetzen von Handarbeit durch Roboter, Reduzierung der Schwierigkeiten bei der Bodenreinigung, Verbesserung der Reinigungseffizienz und -qualität, leicht kompetent in verschiedenen komplexen großen szenen, mit den vorteilen der einfachen bedienung, komfortabel Nutzung, hohe Effizienz und Geschwindigkeit usw., es ist der neue Favorit in Einkaufszentren geworden,Hotels, Hochgeschwindigkeitsbahnhöfe und andere Felder.

Wir können die gebrauchten LNG-Tanks schnell weltweit liefern! China: Versorgung gebrauchter LNG-Tanks ab 30 m³/50 m³/60 m³ usw. Seit dem Jahr 2015/2016/2017...

【Modell】TR10165B-310 【Bewegungstyp 】Mehrgelenktyp 【 Nennlast】165kg 【Bewegungsradius】3100mm 【Gewicht】1600kg 【Anzahl der Achsen】4 Achsen

Merkmale des Inspektionsroboters mit unabhängiger Vierradlenkung: Vierrad-Einzellenkantrieb, mit Stoßdämpfung, ausreichend Leistung Ausgestattet mit „Augenroboter-Positionierungs- und Navigationssystem“ Starke Fähigkeit zum Überqueren von Hindernissen, kann Hindernissen und Straßeneinbrüchen oder Löchern, Gruben usw. flexibel ausweichen und sich an verschiedene komplexe Straßenbedingungen anpassen. Mit Hubstange beträgt der Hubbereich 1054-1634mm. Hardwareressourcen: Ultraschall, Laserradar, Tiefenkamera, Kamera für sichtbares Licht, Wärmebildkamera, Temperatur- und Feuchtigkeitssensor, Geräuschsensor usw. Unterstützt mehrere Modi wie automatische Inspektion und Fernbedienungsfunktion.

Modellnummer TVN-8008_A Serie Multifunktion Auflösung

Spezifikationen Kompatibilität: Leben im Freien Merkmale: wasserdicht Strukturen: Monokular Erhöhen: 12X Objektivlinsen (mm): 50Augenlinse (mm): 23Prisma Typ: BAK4 Nettogewicht / kg): 0,5 gelistet Tag: 05 / 18 / 2020

crp S80 Robotersteuerung unterstützt bis 8-Achsen-Steuerung (Impuls Typ). Es istEntwickelt für den Aufbau eines wirtschaftlichen Roboterschrankes. crp eignet sich gut zum Schweißen, also MIG / WIG Schweißlösung kann unseren Kunden zur Verfügung gestellt werden

Cnc Fräsen 4-Achsregler in China CNC9640 1.CNC9640 ist 4 Achsen Fräsen / Bohren Regler 2.CNC Frässteuerung mit 7 Zoll Sieb 3.can mit addtional zusammenarbeitenPanel und Haltegriff

Aufschlämmungsbilanz TBM: Schlamm wird als Hauptmedium verwendet, um den gemahlenen Druck auf der Tunnel -Ausgrabungsfläche auszugleichen, und die Schlacke wird durch das Schlammfördersystem entladen Der Ausgrabungsdurchmesser deckt 2 7 Meter bis 17 Meter ab.

Eigenschaften des kollaborativen Roboters JAKA Zu 5: Kompakt und leicht: Eigengewicht 23 kg, Last 5 kg, Arbeitsradius erreicht 954 mm; Hohe Flexibilität: Durch die schnelle Bereitstellung kann die Arbeitszeit der Mitarbeiter gespart und die Gesamtproduktivität optimiert werden. Starke Anpassungsfähigkeit: Erfüllt die Anforderungen leichter Vorgänge wie Be- und Entladen, Testen, Montage usw. Empfohlene Branchen und Anwendungen: 3C-Elektronik, Präzisionsfertigung, Bildung, Dienstleistungen

Eigenschaften der E-Zigarette: *Standardtestumgebung: Temperatur: -5—42℃ *Anwendung: Ziehen Sie das Silikon des Zerstäubermundstücks nach außen, um den Rauchauslass freizulegen. Entfernen Sie dann den unteren Aufkleber und beginnen Sie mit der Verwendung. (Wenn die abgesaugte Rauchmenge gering ist, füllen Sie die Batterie bitte rechtzeitig auf.)

Mittelgroße SPS der Serie AM600 anwendbare Branchen: Hochgeschwindigkeitsdruckausrüstung, Lithiumbatteriewicklung, Hochgeschwindigkeitslaminierung, neue Energieindustrie mehrachsige Bussteuerung Produktionslinie, Beschichtungsinspektion, Verpackung, Etikettierung, etc.

es besteht hauptsächlich aus zwei Teilen:intelligente mobile Plattform und automatisches TötungssystemDas automatische Tötungssystem befindet sich unter der Kernsteuerung des Roboters. Du kann mithilfe der Stimme die Tötungskraft, die Tötungsreichweite, den Tötungspfad, die Tötungszeit usw. steuern.

Delta-3D-Drucker sind für PE / PVC ausgelegtDruck von Materialteilen, geeignet für Hersteller von Spielzeugfabriken

Der latente Jack-up-Handhabungsroboter Laser SLAM ist ein verbessertes Modell des ursprünglichen 300J, das ein neues PI-Industriedesign verwendet. Erstens wird die Karosseriegröße optimiert, die nahe an der ursprünglichen Größe von 150 J liegt, die Belastung bleibt jedoch unverändert bei 300 kg; Darüber hinaus werden die optionale nach unten gerichtete QR-Code-Kamera und das 5G-Modul hinzugefügt, und der Standardlaser kann die Reflektornavigation im kleinen Maßstab unterstützen; Gleichzeitig kann das Originalprodukt verschiedene Regale identifizieren und in die Funktion des Wagenheberregals bohren, und die Höhe des Fahrgestells nach dem integrierten Wagenhebermechanismus ist geringer.
Die flexible industrielle Vibrationsplatte TR-FVP380 ist ein Starprodukt, das von unserem R&D entwickelt, produziert und verkauft wird. Es durchbricht Materialstau, Materialabrieb und das Zuführproblem speziell geformter Teile der traditionellen Vibrationsplatte.

leicht zu bedienen: Kraftfreie Technik reduziert effektiv die Auspackzeit und Lernkosten.tragbarer PC,freundliche Mensch-Maschine-Bedienschnittstelleerleichtert die Verwendung des Roboters. Modularität: All-in-One-Modul aus Untersetzungsgetriebe,Motor,Encoderund Antrieb,, das praktisch für eine schnelle Demontage ist. schneller Einsatz: 3 kg Nennlast bei 13 kg Gewicht.leichte Installation und flexibler Einsatz.

Die sechsfarbige Biegeoffsetdruckmaschine verfügt über eine angemessene Struktur und hochwertiges Zubehör, um sicherzustellen, dass die Maschine langlebig, praktisch, qualitativ hochwertig gedruckt, hocheffizient und einfach zu bedienen ist. Diese Maschine ist ein Buchdrucker, der hauptsächlich für den Oberflächendruck von Tassen und Schalen geeignet ist

Spezifikationen der Hochgeschwindigkeits-Klebstoffsprüh-Kartoniermaschine: Modell: TR-ZC-G2 Förderbandgeschwindigkeit: 6000-9000 Stück/h Kartongröße (mm): L70-200*B35-85*H15-50 mm Stromversorgung: 220 V/50 Hz Maschinenabmessungen: L 6100 x B 1800 x H 2000 mm

ADTECH Zusatzplatte passend für 6 Achsen CNC Controller wie CNC4960, CNC9960 usw.

Motorleistung: 3000 W / 5000 W / 7000 W Leergewicht: 169 kg Batterietyp: Blei-Säure/Lithium-Ionen Bruttogewicht: 150 kg+ (abhängig von den Batteriespezifikationen) Batteriekapazität: 60A/80A/100A/120A usw. Länge: 2105 mm Geschwindigkeit: 70-135 km/h Rahmen: Elektrischer Impulsrahmen Radnaben: Aluminiumlegierung Gehäusefarbe: Mehrere Farben verfügbar Reifen: Rutschfeste, verschleißfeste schlauchlose Reifen Bremssystem: Scheibenbremsen vorne und hinten Vorderreifengröße: 110/70-17 Gehäusematerial: ABS/PP Hinterreifengröße: 180/55-17

Der unbemannte Gabelstapler (AGV) übernimmt die japanische AGV-Technologie. nach Jahren der Lokalisierungserkundung und -erprobung, hat er jetzt eine hervorragende Praktikabilität und reiche Anwendbarkeit. die Eigenschaften der In-situ-Rotation, Freundlichkeit der Mensch-Computer-Interaktion[ 3] einfache Erweiterung, und einfache Integration sind die technischen Vertreter von uwangte AGV geworden. das AGV-Scheduling-System hat die Funktion der Fahrstraßensteuerung, Fahrstraßenvermeidung und automatische Ruf- und Aufgabenplanung.

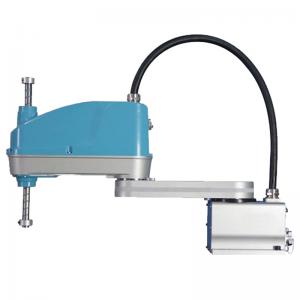
Industrieroboterhersteller in China zu günstigen Preisen ADTECH FR5215 System 5500mm Armlänge 4-Achsen-Heben scara roboter mit avs vision system. ADTECH ist professionell in 4-Achsen Scara F & E, Produktion und Service von RoboternFür Produkte reduzieren Menschen Kosten. Immer mehr Roboter werden in der Produktion eingesetzt. line.ADTECH scara Roboter kann NACHI, TOSHIBA usw. ersetzen.japanische Marke, es ist Anwendung für PCBA Montage , VerschraubenLaden, Verpacken usw. elektrisches Feld

Mini Drohne 2021 Features: * 4k Duale Kameras * 15 Minutenflugzeit. * Maximale Flughöhe 120 Meter * Gewicht Gewicht 0,29 kg * 360 Grad-Stunt-Show.
Ein intelligenter und cooler zweirädriger Roboter und auch eine offene Entwicklungsplattform.

This Die Maschine kann auf Glas, Lichtleiter, Touchpanel und andere Industrien des Beschichtungsprozesses angewendet werdenAlle Anforderungen für genaue Positionsanforderungen können verwendet werden

* Kompakt Struktur, einfach zu installieren und zu warten * Voll Servosystem, Geschwindigkeit ist einstellbar * SPS Kontrolle, hochautomatisch * HMI ist einfach zu bedienen * Mehrere Die Positionen sind mit Erkennungssensoren ausgestattet, die zuverlässig Ausnahmen erkennen, um Abfälle zu reduzieren. * Taste Teile und Komponenten verwenden weltbekannte Marken, um die stabile Leistung der Maschine zu gewährleisten * Stabil Laufen und hohe Effizienz

hohe Qualität Palettieren Roboter, einfache Bedienung für Endbenutzer !

Merkmale der automatischen Handschuh-Tauchlinie : Diese Maschine durch SPS-Programmsteuerung mit automatischen und manuellen Modi, einfacher Bedienung, geringer Größe und Verwendung von Handschuhen Rollenziehhandschuhe ohne Beschädigung. Sein normaler Gebrauch und niedrige Wartungskosten. Auch ohne Gasversorgung, Maschinengeräusch <40dB, Sicherheit, Energieeinsparung und Umweltschutz. Da die vollautomatische Zählung der Maschine verwendet wird, wodurch der Arbeiter reduziert und der Handschuh sofort verpackt werden kann, können so 2-3 Arbeiter eingespart werden, was die Produktionseffizienz erheblich verbessert und die Produktionskosten senkt. Dies ist die ideale Auswahl des Handschuhherstellers.

Composite Cobot Lösung: TR-Verbundroboter werden in zahlreichen Branchen eingesetzt und bieten innovative, effiziente und wettbewerbsfähige intelligente Fertigungslösungen, die es Unternehmen ermöglichen, eine höhere Produktionseffizienz zu erzielen, Kosten zu senken und Innovationen in den Zielbranchen voranzutreiben.

Strahlenschutzanzug: Das gesamte Set besteht aus: Nuklearstrahlenschutzkleidung, Atemschutzgerät, Nuklearschutzhandschuhen, Nuklearstrahlenschutz-Lederstiefeln, tragbarer feuchtigkeitsfester Schleppbox.

technische Parameter: Modell TR350PM Filmbreite Max.350mm Beutelherstellungslänge 65-190 oder 120-280mm Beutelherstellungsbreite 50-160mm Produkthöhe Max.40mm Filmrollendurchmesser Max.320mm Packgeschwindigkeit 40-230bag / MindestLeistungsspezifikationen 220V, 50 / 60 Hz, 2,8 kVA Maschinengröße (L) 4020 × (W) 720 × (H) 1320mm Maschinengewicht 600kg
Hauptprodukte kommerzielle Roboter, Lehrroboter (Lehrroboter für Universitäten, Mittelschulen und Grundschulen), kollaborative SechsachsenRoboter, Foto- und Videoroboter, Schönheits- und Körperroboter, Milchteeroboter, Autoteile, Aufzugsteile, Autoteileprüfwerkzeuge, Präzisionshardware, Zubehör für medizinische Geräte usw.
Hauptprodukt Anwendungen: kommerzielle Roboter, Lehrroboter (Lehrroboter für Universitäten, Mittelschulen und Grundschulen), kollaborative SechsachsenRoboter, Foto- und Videoroboter, Schönheits- und Körperroboter, Milchteeroboter, Autoteile, Aufzugsteile, Werkzeuge zur Inspektion von Autoteilen, Präzisionshardware, Zubehör für medizinische Geräte usw. .

ROKAE CR20 – 20 kg, 6-Achsen, 1798 mm Nutzlast 20 kg Erreichen 1798 mm DOF 6 IP IP67 Marke: ROKAE | Partner: TROY Supply

Kommerzieller Reinigungsroboter: Es verfügt über eine vollständige 3D-Navigation und ein „modulares“ programmierbares Design, um die Reinigungsprobleme in kommerziellen Szenarien gezielt zu lösen. Kann häufig in Krankenhäusern, Einkaufszentren, Campusgeländen, Ausstellungshallen, Bürogebäuden, Terminalgebäuden und anderen Orten eingesetzt werden.

Einführung der Pappbecher-Verpackungsmaschine: * HMI-freundliche Schnittstelle für einfacheren Betrieb; * Hochwertiger AC-Antrieb für Hauptmotor; * Hochpräziser Sensor zur Parameterkompensation; * Förderbanddesign für 24-Stunden-Betrieb; * Perfektes Siegel für jedes Paket.

1. SPS programmierbarSteuerungssystem, einstellbare Geschwindigkeit, Visualisierung der Effizienz, genaue Anzeige von Fehlern, rechtzeitige Beseitigung. Übernahme von Marken wie Siemens, Omron und Mitsubishi. 2. Der Mechanismus wird aktualisiert, von Beim herkömmlichen Vorwärtsschieben zum hinteren Zugmechanismus ist der Platz klein, die Geschwindigkeit ist schneller und der Betrieb ist stabiler 3. Das Design wird verbessert, die Struktur ist integriert, die Kompatibilität ist stärker, die Einstellung ist bequem und nur 3-5 Teile können ausgetauscht werden

Motor: 4 Schlaganfall; Sitze: 3; Leistung:> 300HP Zylinder: 4; Motor Kapazität: 1300cc; Batterie : 12V, 36a Farbe: optional; Artikel Größe: 3100 * 1200 * 1100mm Maximum Last: 200kg; NET Gewicht: 300kg; E. ngine Verdrängung: 1300cc Maximal Leistung: 63 kW (6000 U / min); Einzelpaket Größe: 31x12x11 cmSingle Gross Gewicht: 20.000 kg; Maximale Kraft : 63kw (6000 rpm) maximales Drehmoment : 11nm (4000 rpm); Schmiersystem trockenes Öl KühlsystemWasserkühlung doppelt Schleife; StartmethodeElektrischer Start ECU Treibstofftank Kapazität : 35l; Ölmenge : 3.5l; Anlasser : 380w

1,Verwendungsbedingungen: 380 V / 3-Phasen / 50 Hz; 2,Verwendete Materialien: PP schmelzgeblasen spezielles Material ; Schmelze Fett 1500 3,Produktspezifikationen: L = 420 mm, δ = 0,008 ~ 0,1 mm 4, Extrusion Leistung: 25 ~ 50 kg / H variiert je nach Material, Dicke und Prozess.

Parameter des Cobot CS66: sechs Freiheitsgrade, Gewicht 20kg, Belastung 6kg Arbeitsradius 914 mm Wiederholpositioniergenauigkeit ±0.03mm Höchstgeschwindigkeit 2.6 m/s typische Leistung 250w Schutzart IP54
Die MINEBEE Super Mini Drohnen kommen bald !!!

Wolfram-REM | TR3200 Hochleistungs-Wolfram-REM-Mikroskop mit hervorragender Bildqualität sowohl im Hoch- als auch im Niedrigvakuummodus. Mit einer großen Schärfentiefe und einer benutzerfreundlichen Oberfläche ermöglicht das TR3200 REM-Mikroskop Benutzern die Charakterisierung von Proben und die Erkundung der Welt der mikroskopischen Bildgebung und Analyse.

QS7AA010M ist eine neue Generation von Allzweck-Servomotortreibern, die auf Basis von QS6 optimiert und verbessert werdenSerien-Servotreiber. stabiler und bequemerreifer und stabiler, reichhaltiger und vollständiger Informationen. Die Servotreiber addieren zu 485 neue Kommunikationsfunktionen, bequemere und zuverlässigere Verbindung mit dem Host-Computer oder der Controller-Software
EDU Roboter Anwendungen: kommerzielle Roboter, Lehrroboter (Lehrroboter für Universitäten, Mittelschulen und Grundschulen), kollaborative SechsachsenRoboter, Fotokameraroboter, Schönheits- und Körperroboter, Milchteeroboter, Autoteile, Aufzugsteile, Werkzeuge zur Inspektion von Autoteilen, Präzisionshardware, Zubehör für medizinische Geräte usw.

Funktionen der intelligenten bionischen Roboterhand: ● Bionisches Design mit exquisiter Optik ● Fünf Finger werden von unabhängigen Linearmotoren angetrieben, frei und zuverlässig ● Die Daumenseite ist an die Handfläche anpassbar und die Handflächenposition wird automatisch erkannt ● Elastische Fingerspitzen aus Silikon und Halbhandhandschuhe ● Passive Handgelenkrotation

Die Version 2021 von TR-FL080,, der src-basierte Laser-SLAM-Boden-Smart-Gabelstapler,, hat eine Reihe von Verbesserungen auf der Grundlage der zweiten Generation, mit geringer Größe und starker Tragfähigkeit vorgenommen; Es ist mit dem Core-Controller der SRC-Serie, ausgestattet, der eine hochpräzise Positionierung von ±10 mm erreicht und mit Infrarotsensoren, 3D-Hindernisvermeidung, Sicherheitsleiste und anderen Sensoren für den Sicherheitsschutz, zusammenarbeitet, die dies gewährleisten können die Sicherheit von Personal und Gütern während des Betriebs des intelligenten Gabelstaplers, und kann den Transport von Gütern auf engstem Raum flexibel abschließen,, was die Verwirklichung intelligenter Fabriklogistik. des "Transportartefakts" ist .

Produktspezifikation: Länge 15 m, Höhe 1,8 m, Breite 3,2 m; Geschwindigkeit: 900 Kästchen / Stunde.

Sauerstoffmaschine Spezifikation: Fertigen Sie besonders an Produktion: Ja Extraktionsgas Typ: Sauerstoff Workign Prinzip: KompressionVerarbeitung Kapazität: 6.7 (m3 / h) Abmessungen: 355 * 275 * 370 (mm) Gewicht: 7.3-8.3 (kg)

Der kollaborative Roboter aubo-i5fb kann die Anforderungen von Leichtbauoperationen erfüllen. Nutzlast 5kg, max. Länge 1008mm, max. Reichweite 886.5mm. Breiter Anwendungsbereich, Umfangreiche Konfiguration, Das Ende kann eine Drehung um ±360° realisieren.

Verkörperte Agi -Funktionen: Mit der Huawei Cloud zusammenarbeiten, um die Anwendungsszenarien von "Pangu verkörpert Intelligenz großes Modell + Kuafu Humanoid -Roboter" zu untersuchen.

Oberer Exoskelett-Roboter kann erreicht werden: Eine gesunde Arbeitsweise für alle, um die Belastung und den Druck zu reduzieren, die durch Hebearbeiten verursacht werden ; Wofür das Exoskelett geboren wurde.

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Wasserstrahl-Reinigungsroboter TRWJR-HM_V-Serie: Der Schiffsrostentfernungsroboter ist ein automatisiertes Gerät, das hauptsächlich zur Rostentfernung von Oberflächen großer Stahlkonstruktionen wie Schiffen eingesetzt wird. Dieser Roboter kombiniert Ultrahochdruck-Wasserstrahltechnologie, magnetische Adsorption und Wandkletterrobotertechnologie für eine effiziente und umweltfreundliche Rostentfernung. Gleichzeitig nutzt er Vakuumrückgewinnungstechnologie, um Abwasserrückgewinnung zu ermöglichen, den Ausstoß von Farb- und Rostrückständen zu reduzieren und den Umweltschutz zu gewährleisten. Der Einsatz dieses Roboters verbessert nicht nur die Effizienz der Rostentfernung, sondern reduziert auch die potenziellen Risiken für Umwelt und Gesundheit der Bediener erheblich und unterstreicht seine wichtige Rolle in der modernen industriellen Instandhaltung.

Der beste Beförderer der verkörperten Intelligenz und ein neuer intelligenter Partner für die Menschheit Einschließlich Armfreiheit; Beinfreiheit 18 Freiheitsgrade Für den ganzen Körper Rein elektrischer Antrieb.
OEM Scara Roboter sind für die Fabrik mit elektrischen Komponenten wie Samsung, Foxconn, LG ausgelegtund Kanon usw.

Abmessungen : 1336*1296*1218 Modell : XSJ11A Produktionskapazität : 3600/Stunde Leistung : 120kg/Stunde Nennleistung : 4,7KW Stromquelle : 220V 50Hz(1P)

Geothermische Decke aus Graphen-Kohlenstoffkristall, elektrischer Heizteppich, geothermisches Pad, nordischer minimalistischer Stil, mit Temperaturregler, perfekt für kalte Winter, Leistung 500 W-2000 W.

Rucksackmontierter AMR-Mobilroboter: Category: Logistics and Warehousing AMR/AGV Equipment Industry: Handling/Loading/Unloading | Other Wheel System: Mecanum Wheels Load Capacity: 20-30 tons Navigation Method: Laser Navigation.

Merkmale der Solarbatterie-Powerbank: Kategorie: Solarenergiebank Marke: OEM Akkutyp: Softpack Zellentyp : Polymer-Lithium-Ionen-Akku Gehäusematerial: Kunststoff Funktion: Solar Farbe: orange, blau, grün, schwarz Stromkapazität: 99000 mA Umwandlungsrate: 90 (%) Ladeleistung : 5 W

TR800B vierachsig SCARA Industrie Roboter: Der Roboter ist ein Mehrgelenk vierachsig Roboter mit vollständigen unabhängigen Eigentumsrechten von LBD. Es verwendet eine Hochleistungssteuerung zur Steuerung des Roboters, um eine schnelle Punktbewegung, eine räumliche lineare Interpolationsbewegung, eine räumliche Bogeninterpolation und andere Funktionen zu erreichenes ist zum Handhaben, Laden und Entladen geeignet, Punktschweißen, Kleben und andere industrielle Anlässe

Das System der Latexballontauchmaschine realisierte die Kommunikation, die durch die Mensch-Maschine-Schnittstelle gesteuert wird

Ausstattungsmerkmale: * Hochgeschwindigkeits-Prozess bis zu 600 Stk./min. * große Nutzlast des Delta-Roboters um 7 kg. * japanische Panasonic Servomotoren. * kleineres Design als andere berühmte Marken

Mini-AOI-Messgeräte mit Ein-Knopf-Bedienung finden breite Anwendung in der Industrie: Einschließlich Maschinenbau, Elektronik, Formenbau, Spritzguss, Metallverarbeitung, Gummiverarbeitung, Niederspannungs-Elektrogeräte, Magnetwerkstoffe, Präzisionsstanztechnik, Steckverbinder, Klemmen, Mobiltelefone, Haushaltsgeräte, Leiterplatten, medizinische Geräte und Uhren usw.

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

taiwan berühmte Marke Servoantriebe A2 und B2 Serie

Merkmale des elektrischen Schubgabelstaplers: Marke: OEM Stahlplattenstärke: Gabel 8 mm Gewicht: 50 kg Maximale Hubgeschwindigkeit: 8 cm/s Anzahl der Rollen: 4 Stück Rollenmaterial : Nylon Plattenstärke : 4 cm Spezialbranche: Logistikindustrie / Be- und Entladeteam / Fabrik Tragfähigkeit: 500 kg Gabellänge : 90 cm Modell: TR-C01

Produktionslinie für Latexhandschuhe für den Haushalt: Die Latex-/Nitrilkautschuklösung der Haushaltshandschuh-Tauchmaschine wird von der Spitze des Destillationsturms zugeführt und durch Dampfheizung destilliert. Das Eintauchen von Haushaltslatexhandschuhen in Produktionsanlagen übernimmt die fortschrittliche Technologie und das Prozessformeldesign japanischer und koreanischer Produktionslinien für Kaschmirhandschuhe. Der Geräteaufbau ist sinnvoll und für verschiedene Formeln geeignet.

Analyse der Vorteile von Bauteilbestückungsmaschinen : 1. Ersatz menschlicher Arbeit 2. Theoretische Geschwindigkeit 24.000 Punkte/h 3. Einfache Bedienung, hohe Stabilität 4. Flexibler Einsatz der Produktion 5, niedrige Wartungskosten

- Kühlart : Wasserkühlungsstruktur- Probentisch : Durchmesser des Substrats Φ 80 mm- Temperaturmessung auf dem Substrat : Infrarot-Temperaturbereich 300 – 1400 ℃ + Intelligente KI-Temperaturmessung (doppelte Temperaturmessung)- Höhenverstellung : Die Wachstumshöhe des Probentisches kann um ± 15 mm angepasst werden- Erweiterbarkeit : Die Wachstumsplattform kann erweiterbar sein
TRLINE-N95 Produktionslinie zur Herstellung von Produkten unten: Gesichtsmaske für Krankenhaus N95 SchutzmaskeGesichtsmaske für Coronavirus medizinische Einwegmaske

Ausrüstung für die Ionenimplantation Merkmale: • Hohe Produktivität IonSolar hat die Funktion der kontinuierlichen Folienzuführung, und die Produktionskapazität einer einzelnen Maschine kann 1800 Stück/Stunde erreichen, was es ermöglicht, eine Produktionslinie mit nur einer Maschine auszustatten, und eine gute Übereinstimmung mit der Produktionskapazität der erreicht bestehende Produktionslinie.

Radroboter mit zwei Armen Helios! Positioniergenauigkeit in Industriequalität: 10 mm; Genauigkeit der Armmanipulation: ±0,1 mm; Gesamtkörperfreiheitsgrade: 42; Multimodale Fusionswahrnehmung: Strategie der Haltungs-, Seh- und Kraftkontrolle: Taktik von Haltung + Sehen + Kraft; Maximale Nutzlast pro Arm: 5 kg.

MG500 Rallye-Motorräder sind für Offroad-Nutzer konzipiertkann sowohl auf der Landstraße als auch im Gelände gefahren werden

Hauptfunktionen des unteren Exoskelett-Roboters : *Servo-Antriebseinheit *Drei-Kraft-Impedanz-Steuerungstechnologie *Integrierte Antriebseinheit zur Kraftsteuerung *Integriertes TBG (Twist Belt Gear) *Verzögerungssystem

R1 Roboter Features: -Verfassung Für Wassersuche und Rettung, Feuerrettung, Abschleppen und Rettung Transport. -Support Remote Steuerung / Local Dual-Control-Modus -Support ein Schlüssel Rückkehr nach Hause, außerhalb der Kontrolle Rückkehr nach Hause, Rückwärtsgang -Support Infrarot intelligente menschliche Erkennung Suitable Für Szenen wie Meer, Reservoirs, Flüsse, Seen usw.

TR-SBA für Einfachformlinie TR-SBB für Doppelformlinie Hauptprodukte: Nitril/PVC/Latex. Untersuchungs-, OP-Handschuh, Einweghandschuh für Haushalt und Sicken, gerade (gepudert/puderfrei).

Hauptmerkmal der Starrflügel-Hybrid-VTOL-Drohne: --- HD-Foto- und Videobeweissammlung Ausgestattet mit einer Luftkamera kann das UAV Beweise für illegale Handlungen aus der Luft sammeln, um das beschädigte Gebiet zu untersuchen, und mit der Bodenpolizei zusammenarbeiten, um nach dem Ziel zu suchen.
Der TRE500S Körpergelenk besteht aus hochfestem Aluminium, um die Maschine zu gewährleistenhohe Festigkeit, hohe Geschwindigkeit, hohe Genauigkeit und hohe Stabilität

Von 500 kg, 1 Tonne bis 40 Tonnen Nutzlast 6 Fuß Steward Roboter sind verfügbar !

Eigenschaften des Jaka Cobot Zu 12: Der kollaborative Roboter JAKA Zu 12 hat ein Eigengewicht von 41 kg, eine Last von 12 kg und einen Arbeitsradius von 1327 mm; Integriertes Gelenkdesign, einfache Montage und Demontage; Höhere Tragfähigkeit und größerer Arbeitsradius ersetzen schwere manuelle Handhabungsarbeiten unter Berücksichtigung der Einsatzflexibilität und Benutzerfreundlichkeit; Es müssen keine Sicherheitszäune installiert werden und es kann nahtlos mit Menschen, Robotern und der Umgebung zusammenarbeiten; Empfohlene Branchen und Anwendungen: Automobile und verwandte Bereiche, Präzisionsfertigung, Elektrogeräte, Lebensmittel

Erddruckbilanz TBM: Der Mist wird als Hauptmedium verwendet, um den Bodendruck auf der Tunnelaushuboberfläche auszugleichen, und die Schlacke wird durch einen Schraubenförderer entladen Der Ausgrabungsdurchmesser umfasst 3 Meter bis 14 Meter.

* Multi-Grad der Freiheit bionischen Arm * Sprachinteraktion + Gesichtserkennung * Entwickler Eco + Erweiterungsschnittstelle * 3D Slam Innenkonstruktion Kartennavigation * OmnidirektionalStrategie zur Vermeidung von Hindernissen

SAR130 ist eine 4-Achse vertikal Multi-Joint Roboter mit einer effektiven Stanzlast von 130kg. Es kann sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen und können je nach Kundenfutter fünf oder sechs Achsen anpassen. Das sar130 Das Produkt ist leicht zu verstehen und hat eine solide Struktur, um den Anforderungen der Kunden für Produktdiversifizierung, hohe Effizienz und Produktproduktion zu erfüllen.

Die hohe Konfiguration unseres Delta-Roboters gewährleistet mit hoher Leistung und hoher Kostenleistung : *Durch Verwendung von importiert aus Japans Panasonic- Servomotoren. *durch hochpräzise Planetengetriebe. *Nutzlast von 1kg bis 15kg. *Arbeitsdurchmesser von 350 mm bis 1400 mm.

Der Inspektionsroboter verwendet hochintelligente Robotertechnologie und Bilderkennungstechnologie, um die manuelle Durchführung der Erkennung und Diagnose des Betriebszustands der Ausrüstung in einer speziellen Umgebung zu ersetzen, eine flächendeckende Inspektion des Ausrüstungsbereichs zu realisieren und mehrere Funktionen wie Sicherheitsinspektion, Umgebungsüberwachung und Raucherkennung. Es kann potenzielle Sicherheitsrisiken wie Brände und Diebstahl effektiv reduzieren, das Problem schwacher Mitarbeiter im Dienst lindern und die Arbeitseffizienz verbessern.

Technische Daten der Knödelmaschine Abmessung: 3400*2850*2000 Modell: ZK-3-SJ Erzeugungsrate: 14000/Stunde Leistung: 280 kg/Stunde Leistung: 12,9 kW Leistung: 380 V 50 Hz (3P)

Die TVN-2K30/4K30 HD-Industriekamera Es ist benutzerfreundlich und bietet eine integrierte, personalisierbare Benutzeroberfläche, Vorlagenanwendungen, Mausbedienung und USB-Speicherfunktion. Zu den Funktionen gehören automatische Kantenerkennung, automatische Konturierung, horizontales und vertikales Spiegeln, Linien-/Kreiskalibrierung, Datenexport und Wiedergabe. Außerdem bietet es verschiedene Messwerkzeuge wie Parallellinien, Punkt-zu-Linie-Verbindungen, konzentrische Kreise, Winkel und Radiant.

Automatisierung der Kartontransfereinheit Unbemannte Kommissionierung und Handhabung Heben durch CTU AMR-Roboter: 6 Lagen mit je 50kg Nutzlast; Integrierte Steuerung, effizient und einfach zu bedienen!

Durch Forschung und Entwicklung, Produktion, Vertrieb und Service intelligenter Geräte für Haushaltspapier erhalten Kunden vollautomatische intelligente Geräte und umfassende Lösungen für die Herstellung, Verarbeitung und Verpackung von Haushaltspapier.

Portalschweißmaschinen können eine Komplettlösung für massive Schweißarbeiten mit regulären Schweißteilen bietensehr einfache Bedienung vor Ort

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen
Die intelligente Erklärung der Kreuzfahrt führt automatisch den Weg: * Adopt fortschrittliche drahtlose Lasernavigationstechnologie zum schnellen Scannen und Erstellen von realen Karten. * Automatisch Kreuzfahrt Erklärung, genaue Lage * Stimme Die Aktivierung führt automatisch zum angegebenen Ort * Mehr als 70% Versorgungsgebiet, Panorama-Straßenverhältnisse, sicheres Hindernis Vermeidung.

Die ultra-superkritische 660-MW-Dampfturbine mit doppelter Nacherhitzung deckt einen Leistungsbereich von 600 MW bis 700 MW ab, mit Dampfeinlassparametern von 31 MPa/600 °C/610 °C/610 °C bis 35 MPa/610 °C/630 °C/630 °C.

Stabilisierung und Verbesserung der Schweißqualität und Gewährleistung ihrer Gleichmäßigkeit; Verbesserung der Produktivität, kontinuierliche Produktion 24 Stunden am Tag; Verbesserung der Arbeitsbedingungen der Arbeitnehmer und langjährige Arbeit in schädlichen Umgebungen;die Anforderungen an die Arbeitnehmer verringernBedienung Fähigkeiten; Verkürzung des Zyklus der Produktänderung und des Produktaustauschs und Verringerung der entsprechenden Investitionsausrüstung; kann Batch-Produktschweißen realisieren;Platz sparen. Hauptanwendungen —— Schleifen und Polieren Schneiden, Schleifen, Entgraten, Reinigen, Polieren, Wasserschneiden und andere Verarbeitungsanwendungen

GH-CNC820 ist 4 ~ 6 Achsen Wirtschaftstyp CNC Federregler, es ist spezialisiert auf Druckfeder Maschine, Torsionsfeder Maschine. es hat 5.7 Zoll LCD-Bildschirm und englische Anwendung Software.

Unbemannter Gabelstapler TR-TF2000A: Unbemannte Gegengewichtsstapler basieren auf einem Positionierungs- und Navigationssystem, das mehrere Sensoren wie Multiline-Lidar, RTK und Trägheitsnavigation integriert. Es kann eine Gesamtlösung für unbemanntes Gabelstaplerfahren, Mehrmaschinenplanung und Logistikautomatisierung bieten und Paletten, Fracht, Produktionslinien usw. in komplexen Szenarien identifizieren und lokalisieren und so präzise Gabelstapler- und Handhabungsvorgänge durchführen.

Elektro-Stand-Up-Gabelstapler Einführung: Der elektrische Stand-Up-Gabelstapler ist zum Heben von Standardpaletten mit einer Tragfähigkeit von 500 kg und einer Hubhöhe von 2000 mm ausgelegt. Der elektrische Gabelstapler ist eine ideale Einrichtung zum Be- und Entladen von Waren in Stapellagern, Supermärkten, Werkstätten, Produktionslinien oder zum Umschlagen von Waren auf/von Lastwagen, Containern usw

Das Untere Gliedmaßen Exoskelett Roboter: Das 12-Grad-of-Freedom Der niedrigere Gliedmaßen-Power-Assisted Exoskeleton-Roboter ist vollständig elektrisch angetrieben und kann 5 Stunden ohne Einschränkungen laufen. Tragen kann es leicht tragen 50kg und gehen.

ROKAE CR12C xMate – 12 kg, 6-Achsen, 1434 mm Nutzlast 12 kg Erreichen 1434 mm DOF 6-Achsen IP IP67 Merkmale Kraftmessung, direktes Lehren, Rokae Studio Simulation. Marke: ROKAE | Partner: TROY Supply

*Benutzerfreundliches offenes Tablett-Design für angenehme kulinarische Erlebnisse. *21 Zoll hochauflösendes Werbedisplay, das die Marketingmöglichkeiten erweitert. *Dynamische lebensechte Interaktion, sensorische Kommunikation. *CADEBOT: ein umfassender kommerzieller Lieferroboter mit mehreren Szenarien.

Merkmale der Carbon Crystal Lackierheizung: Nennspannung: AC220V +/-5 %, 50 Hz Leistung: 500 W Rahmen : Alurahmen Zertifizierung: CE, RoHS Lebensdauer: >100.000 Stunden Überhitzungsschutz: Ja Elektrische Umwandlungsrate: 98 % Heizelement: Kohlenstoffkristall Infrarotstrahlertyp: elektrisch Leckstrom: unter 0,01 mA Bildschirmtemperatur: 70-85 °C Heizfläche pro Stück: >20m2 Farbe: Gemälde/Bild/Reinweiß Installation: Wandmontage, Freistehend Funktion: Intelligenter einstellbarer Thermosta-Überhitzungsschutz

Roboter Anwendungen: ——Material Handhabung, Palettierung, Druckguss, Montage größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;Minimieren Sie Fehler durch den Roboter visuelle Funktion; (ob es verwendet werden soll) maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung;

Artikel Name: Industrielle Kühlschränke und Gefriergeräte Typen: Kühlgeräte für kalte LagerungModell Anzahl: Tr- HTBX120 Verwendet: Dieses Produkt eignet sich für Niedertemperatur Freezing-Test von Materialien. Dimesion : 590 * 800 * 600 Einheit Gewicht: 50.0 kg OEM Verfügbar!

Mini-Elektro-Gabelstapler-Einführung: Smart Forklift wurde entwickelt, um Standardpaletten mit einer Tragfähigkeit von 500 kg und einer Hubhöhe von 3000 mm zu heben. Der Mini Electric Forklift ist eine ideale Einrichtung zum Be- und Entladen von Waren in Stapellagern, Supermärkten, Werkstätten, Produktionslinien oder zum Umschlagen von Waren auf / von Lastwagen, Containern usw

Roboter e Xoskelett Merkmale: Durch die Unterstützung des Exoskelett-Roboters, wird das Moment, das entsteht, wenn sich der menschliche Körper nach vorne beugt und nach vorne lehnt, durch die Aktion der Oberschenkel und des Gesäßes, ausgeglichen, um die Belastung der Taille zu verringern, Ermüdung zu reduzieren und schützt die Wirbelsäule.

Roboter Street Kehrmaschine Spezifikation: Reinigung Breite: 1900mm Volumen: 230l Maximale Reisen Geschwindigkeit: 60kg / H Wassertank Kapazität: 80l Maximale Reinigung Kapazität: 13000 Quadrat Meter / H Reinigung Effizienz: 3600 Quadrat Meter / H Arbeiten Geräusche: 56-70db Batterie Kreuzfahrt: 6 Stunden

sechs Freiheitsgrade, Gewicht 13kg, Belastung 3kg Arbeitsradius 624 mm Wiederholpositioniergenauigkeit ±0.03mm Höchstgeschwindigkeit 2.0 m/s typische Leistung 150w Schutzart IP54

4-Achs-Industrieroboter sind für Stanzmaschinen CNC ausgelegtMaschinenzufuhr Anwendungen. OEM Kunden sind mehr alswillkommen !

Palettierroboterlösungen für schwere Kartons: *200 kg Nutzlast *3000 mm Arbeitsradius *0,03 mm Wiederholgenauigkeit *Yaskawa-Servosystem *LNC Robotersteuerungssystem

3D-Betrachtungsmikroskop TVN-800+P3D-Hardware: Das gesamte Gehäuse (einschließlich Linse, LED-Licht und Verarbeitungseinheit); 13-Zoll-Bildschirm; Zubehör (Gleichstromkabel für Mikroskop/Bildschirm, Maus, HDMI-Kabel)

Balance Crane Features: 1. Die Reichweite beträgt 7 Meter und der Markt ist im Allgemeinen 5 Meter. 2. Der Hebemechanismus übernimmt das Aufzugsprinzip und die Ausfallrate ist gering. 3. 360-Grad-freie Drehung, kein toter Winkel. 4. 1,5-kW-Motor, geringer Energieverbrauch und geringe Geräuschentwicklung. 5. Das Aussehen ist elektrostatisch gesprüht, was schön ist und eine gute Korrosionsschutzleistung hat. 6. Es kann nach Kundenwunsch angepasst werden.

Spiralförderer Anwendungen: wie Lebensmittelgitter Gürtel; Förderkette für Lebensmittelreinigung Platte; B-förmig Maschengürtel für Schokoladenüberzug Maschine. Gleichzeitig werden Keksmaschinen, importierte Maschinen und ultradünne Maschinen hergestelltenergiesparendNetzgürtel, gedämpftes Netzgürtel, Frittierbox, Trockenaufhängebox usw.

Hauptanwendungen: großformatiges Architekturglas, Heimdekoration, Außenwand Verbundglas, etc. Bauwesen, Badezimmer, Elektrogeräte, Möbelglas, etc.

Der mobile kollaborative Roboter MOD selbst ist ein Bediener, der sich autonom bewegen und die Aufgaben mehrerer verschiedener Stationen in der Produktionslinie rechtzeitig erledigen kann. Verwenden Sie den Mecanum-Radantriebsmodus, realisieren Sie eine 360 ° -Bewegung in jede Richtung und können Sie flexibel auf kleinem Arbeitsraum arbeiten, um die Standortauslastung und Produktionseffizienz effektiv zu verbessern. Durch die Anpassung reichhaltiger Endvorrichtungen und visueller Kenntnisse sind verschiedene Geräte, die Greifen, Zusammenbau, Sortieren, Be- und Entladen, Bewegen, Handhaben, Sichterkennung und andere Funktionen realisieren können, genauer, stabiler und effizienter. Zweiarmiges bionisches Design, näher am menschlichen Betriebsmodus, geeignet für eine Vielzahl typischer Arbeitsplätze, die beide Hände gleichzeitig erfordern.
intelligenter Lackierroboter Anwendungen: Dieses Produkt wird häufig zum Besprühen von Toiletten, Waschbecken, Waschbecken, Hockpfanne, Wischbecken, Urinal, Stehbecken, Waschtisch und anderen Sanitärprodukten, und verwendet erfüllt vollständig seine Verglasungsanforderungen.
Im Resonanzhohlraum des TR-6650 für die chemische Gasphasenabscheidung mit Mikrowellenplasma befinden sich keine internen Elektroden, wodurch eine durch Elektrodenentladung verursachte Verschmutzung vermieden werden kann. Sein Betriebsdruckbereich ist relativ breit und das erzeugte Plasma weist eine hohe Dichte, eine große Fläche, eine hohe Stabilität und keinen Kontakt mit der Vakuumwand auf, um eine Kontamination des Films durch die Wand zu vermeiden.

Mobile Roboterplattform p Parameter: Leergewicht: 70kg Nennlast: 85KG Geometrische Größe: 974,16*782,02*364 (mm) Die schnellste Geschwindigkeit: 2m/s Fähigkeit zur Überwindung von Hindernissen: 160 mm Motorparameter: 4*400W bürstenloser Servomotor Kommunikationsschnittstelle: CAN/232 serielle Schnittstelle Steigwinkel: <30° Wenderadius: 360° an Ort und Stelle Batterie: 48V30AH Lithiumbatterie

80HP Diesel | L4 autonomes Fahren | RTK 2,5 cm Präzision | 32-Linien-LiDAR | 4WD 12F/12R | Cat-2-Dreipunktaufhängung | Dual PTO 540/760 rpm | 4040x1850x2740mm | 3200kg | DG/T 001-2019 zertifiziert
Die MINEBEE Super Mini Drohnen kommen bald !!!

Flexibler Fertigungs -KI -Roboter: Es wurde für flexible intelligente Fertigungsszenarien entwickelt und verfügt über mehrere Funktionen wie das Greifen, Platzieren, Transportieren und Verstopfen Es verfügt über selbst entwickelte intelligente Algorithmen und offene Schnittstellen und Werkzeuge, um die Sekundärentwicklung zu erleichtern Die Betriebsfähigkeiten von TR-A2 können durch Datenakkumulation kontinuierlich optimiert werden Je mehr es verwendet wird, desto intelligenter wird es und desto effizienter wird es.

Arbeitsradius: 400 mm Nutzlast: 1.5kg Wiederholgenauigkeit: 0.02mm Drag-Lehrsystem Antikollisionsfunktion

Mehrschicht Palettenfreie Kombination. Die Anzahl der Paletten kann frei gewechselt werden, offene Paletten Design, Einzelschichtlast 10kg, Gesamtlast kann sein Bis zu 40 kg, kostenlos, kostenlos und einfach zu bedienen Die laute Umgebung reagiert wie ein Bach Ausgestattet mit HD HD HD Kamera, 6Mic Array- und Betriebsbildschirm, Support Visual, Voice, Touchscreen Mehrere interaktive Methoden Erkennen Sie den Weg unabhängig, schnell und stabil Eingebaute Sensoren, autonom Planen Sie die optimale Route Ausgestattet mit Lidar-Hindernis-Vermeidungssystem stabilere Lieferung

Drohnen werden häufig in den Bereichen Zivil-, Polizei-, Stadtmanagement-, Landwirtschafts-, Geologie-, Meteorologie-, Strom-, Rettungs- und Katastrophenhilfe, Videoaufnahmen und anderen Branchen eingesetztDrohne elektronische, informierte und intelligente Inspektionen durchgeführt haben, die die Effizienz der Inspektionen von Stromleitungen, das Niveau der Notfallrettung und die Zuverlässigkeit der Stromversorgung verbessernIn Notsituationen wie Sturzfluten und Erdbebenkatastrophen können Drohnen Vermessungen und Notfalluntersuchungen zu potenziellen Gefahren der Leitung wie dem Einsturz der Turmbasis durchführen, ohne von den Straßenverhältnissen beeinflusst zu werden, und dies ist nicht erforderlichklettere auf den TurmEs kann auch die blinden Ecken des menschlichen Auges überblicken, was sehr hilfreich ist, um die Stromversorgung schnell wiederherzustellen

Anwendungen: ——Material Handhabung und Palettierung größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung.

4-Achs-Delta-Roboter sind für die Lebensmittelverpackung in den Produktionslinien konzipiert. wie Schokoladen-, Keks- und Brotfabrikanten.

Hauptfunktionen: Drücken Sie EVA, Solarzellen, gehärtetes Glas und Trägerfolie (Materialien wie TPT) in eine starre Einheit unter Hochtemperatur Vakuumbedingungen

Das Elektronenmikroskop TR-MS8001 ist weit verbreitet: wie Mikroskop für Leiterplatteninspektion und QC-Abteilung. auch Universitätsklasse etc.

Plasma / Flamme Schneidemaschinensteuerung berühmte Marke in China CNC Industriebereich einfache Bedienung und mehrere Funktionen Technischer Online-Support

Roboter Eigenschaften: großer Arbeitsraum hohe Wiederholungspositioniergenauigkeit stabile Leistung schnell rennen gute allgemeine Leistung modularer mechanischer Aufbau

TR10-700-400 ist ein 4-achsiger vertikaler Mehrgelenkroboter mit einer effektiven Stanzlast von 10 kg. Es kann sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen und kann fünf oder sechs Achsen nach Kundenwunsch anpassen. TR10-700-400 Produkt ist leicht verständlich und hat eine solide Struktur, um die Anforderungen der Kunden nach Produktdiversifizierung, hoher Effizienz und Produktproduktion zu erfüllen.

Das digitale metallografische Mikroskop ( TVN-MT4K80) ist ein optisches Inspektionsgerät, das für die High-End-Fertigung und -Forschung in der Halbleiterindustrie, der Silizium-Wafer-Herstellungsindustrie, der elektronischen Informationsindustrie, der metallurgischen Industrie, der medizinischen Prüfung, der wissenschaftlichen Forschung usw. entwickelt wurde. Als metallografisches Mikroskop der Spitzenklasse können Benutzer bei der Verwendung seine hervorragenden Bildeffekte und eine klare mikroskopische Welt bei hoher Vergrößerung erleben. Das MT40-Mikroskop kann in der Halbleiterforschung und -entwicklung, der Herstellung, FPD, Schaltungsverpackung, Schaltungssubstraten, Materialien, Gussteilen/Metall-/Keramikteilen und der Präzisionsformprüfung weit verbreitet eingesetzt werden. Dieses Instrument verwendet eine Hochleistungs-LED-Beleuchtungslampe mit zwei Beleuchtungsformen: Reflexion und Transmission. Hell- und Dunkelfeldbeobachtungen, DIC-Beobachtungen und Beobachtungen mit polarisiertem Licht können unter reflektierter Lichtbeleuchtung durchgeführt werden. Hellfeldbeobachtungen werden unter durchgelassenem Licht durchgeführt. Das stabile und hochwertige optische System macht das Bild klarer und den Kontrast besser. Das Design, das den Anforderungen der Ergonomie entspricht, sorgt dafür, dass Sie sich bei der Arbeit wohl und entspannt fühlen.

Verbindung Jagdbogen-Parameter: Rechtshänder, IBO 320fps; Achse-zu-Achse: 31"; Zuggewicht: 19-70lbs, Auszugslänge: 19"-30" verstellbar, ohne Bogenpresse, Strebenhöhe: 7", Ablass: 80%, Bogengewicht: 3.95lb

Lässt Signale mit Frequenzen unterhalb der ausgewählten Grenzfrequenz durch und dämpft Signale mit Frequenzen oberhalb der Grenzfrequenz.

1) 4-Achsen CNC Fräszentrum 2) 7.0 Zoll Farbe LCD-Bildschirm 3) neues Designmodell 4) ATC und Makrofunktion

Anwendungen für halbautomatische Bandwickelmaschinen : Der Trend der industriellen Automatisierung erfordert SMT-Operationen in der Elektronikindustrie, Induktivitäten, Transformatoren, Steckverbinder, Kristalloszillatoren, Halbleiter, Metallstanzbleche, verschiedene JACKs, ICs, USBs, Energieinduktoren, Antennen/Schilf, Schalter, elektrische Schlüssel, Schalter, Ladegeräte usw. Die Verpackungsmethoden von SMD-Patch-Elektronikteilen wie Batteriehaltern werden alle auf die Trägerbandverpackung übertragen. Halbautomatische SMD-Verpackungsmaschinen und automatische Verpackungsmaschinen sind Geräte, die Verpackungsvorgänge gut handhaben.

Wasserdrohne mit Kamera: * 4 Arbeitszeit * Wasser Tiefe 30 Meter * Fisch Finder-Gerät. * Vr Gläser unterstützt es

Eigenschaften des fliegenden Rettungsrings: Maximale Geschwindigkeit: 14 m/s Windwiderstand: Stufe 7 Überleben bei Seegang: Stufe 2 IP-Klasse: IP68 Flugzeit: 10min Eigengewicht: 4,5 kg Arbeitsbereich: 1000 m

mobile Roboterplattform p Parameter: Leergewicht: 70kg maximale Zuladung: 80kg geometrische Größe: 974.16*782.02*364 (mm) die schnellste Geschwindigkeit: 7.2 km/Stunde Hindernisüberwindungsfähigkeit: 130 mm Motorparameter: 4 * 400W bürstenloser Servomotor Kommunikationsschnittstelle: Serielle Schnittstelle CAN/232 Steigwinkel: <30° Wenderadius: 360° an Ort und Stelle Batterie: 48V30AH Lithiumbatterie

Der 6-Achsen-Desktop-Roboter ist für die Montage elektrischer Komponenten und CNC ausgelegtMaschinenfütterung etc.

Anwendungen für kollaborative Serviceroboter: 1, Bar/Kneipe als Barkeeper 2, Produktionsassistent 3, Vorführung / Ausstellungsraum

Funktionen des AI-Empfangsroboters: Verwendung: Restaurant- und Hotelbedarf Herkunftsort: China Modellnummer: TR-WS02 Farbe: Sternenweiß / Sternennachtschwarz Material: Hochfestes PC + ABS Größe: 410 mm * 410 mm * 1000 mm Anwendbare Personen: ALLE Batteriekapazität : 10,4 Ah , 25,2 V Lebensdauer : 8h Nettogewicht: 21,1kg Bildschirmgröße: 14 Zoll

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Feuerwehrroboter TR-M4DA: Der hochtemperaturbeständige Feuerlöschroboter nutzt eine Reihe hochtemperaturbeständiger patentierter Technologien, die dem Roboter die Fähigkeit verleihen, mehr als 30 Minuten lang kontinuierlich in einer Hochtemperaturumgebung von 1000 °C zu arbeiten. Es kann Feuerwehrleute ersetzen, die für längere Zeit tief in gefährliche Hochtemperaturbrände vordringen, um Brandaufklärungs- und Brandbekämpfungsarbeiten durchzuführen. Es ist extrem Die Erde hat den Kampfumfang und die Fähigkeiten des Feuerrettungspersonals erweitert.
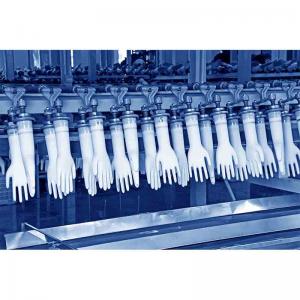
TR-SBA & TR-SPM chirurgische Untersuchung Einweg-Handschuh-Tauchmaschine und Handschuh-Verpackungsmaschine TR-SBA für Einzelformlinie TR-SBB für Doppelformliniegeeignete Materialien: PVC-Emulsion \ Latex \ Vlnyl Hauptprodukte: PVC / Latex / Vinyl Handschuhe zur Untersuchung, Operation, Einweghandschuhe für den Haushalt und Perlen, gerade (puderfrei / puderfrei).

Steckmaschine Merkmale: mechanische Befestigung des Untergrundes + visuelle Positionierung von Markierungspunkten, hohe Präzision schneller Linienwechsel, schnelle Geschwindigkeit, entsprechend verschiedenen Materialien Flexibler und unabhängiger Feeder, starke Vielseitigkeit, einfach zu ersetzen Es kann automatisch Komponenten in vier Verpackungsmethoden zuführen: Bulk, Klebeband, Schlauch und Tablett Je nach Kunde können unterschiedliche entsprechende Pläne erstellt werden, um die Anforderungen verschiedener Kunden zu erfüllen

Trailer Moving Robot verwendet SLAM-Technologie mit Multisensorfusion, darunter Laser-, Sicht- und Satellitennavigationssensoren. Außerdem verfügt er über ein multifunktionales Fahrgestell, das geschleppt oder gezogen werden kann. Trailer Moving Robot kann in verschiedenen Bereichen wie Fabriken, Automobilbau, Häfen und Lebensmittel eingesetzt werden und ermöglicht unbemannten Transport bei jedem Wetter und mit vollem Funktionsumfang.
Polierte Siliziumwafer-Eigenschaften: Durchmesser (mm): 200 Modell: P, N Kristallorientierung: , , Starke Verarbeitungsfähigkeiten und technologische Garantien und können Produkte und Dienstleistungen anbieten, die den Kundenbedürfnissen gemäß den Kundenbedürfnissen oder spezifischen Spezifikationen entsprechen.

Controller Batterie: 3,7V 300mA Motor: 1806 bürstenlosMotor- item name: SJRC F11 RC bürstenlosDrohneLadezeit: ungefähr 3.5h Flugzeit: ca. 25 min GPS / GLONASS doppelter Modus: Ja 5G wifi bildübertragung entfernung: 400-500 m (Freie Interferenz und keine Okklusion) Kamera: 90deg Einstellbarer Winkel per Fernbedienung

ROKAE CR18C xMate – 18 kg, 6-Achsen, 1062 mm Nutzlast 18 kg Erreichen 1062 mm DOF 6-Achsen IP IP67 Marke: ROKAE | Partner: TROY Supply

Palettierroboterlösungen für schwere Kartons: *300 kg Nutzlast *3000 mm Arbeitsradius *0,03 mm Wiederholgenauigkeit *Yaskawa-Servosystem *LNC Robotersteuerungssystem

1. Anwendungsszenario: automatische Produktion von 4-6 Schichten falten Masken. 2. Grundfunktionen: A. Falzmasken werden von der gesamten Maschine in automatischer Montagelinie hergestellt B. Installieren Sie automatisch die Nasenbrücke, die Kantenstreifen, das Formen und das Schweißen C. Automatisches Drucken des Logos, Schneiden von Ohrriemen, Ultraschallschweißen D. automatisches Falten, Schweißen, Schneiden, Nivellieren und Versand.

3D-ElektronenmikroskopMerkmale: *Der 3D-Modus der dreidimensionalen Betrachtungsebene kann umgeschaltet werden *Kontinuierliche Ablesung der Lichtquelle einstellbar. 0,7-4,5-fache optische Vergrößerung einstellbar *Bildspeicherung, Frame-Freeze, Bildvergleich *Starke Lichtunterdrückung, Kantenverstärkung *Farbunabhängige Anpassung *Weißabgleich-Anpassung. Passen Sie die Belichtung automatisch an *Hohe Geschwindigkeit 60 Bilder pro Sekunde, Mausbedienung, Lesen und Schreiben auf U-Disk

H1 Pro bietet außerdem einen Fitnessmodus, der auf intelligente Weise einen umgekehrten Widerstand beim Anheben und Drücken der Beine bereitstellt und so die zentralen Muskelgruppen des Benutzers beim Gehen präzise und effizient trainiert und so Fitness- und Körperformungseffekte erzielt.

Merkmale des leisen industriellen DC-Lüfters: *Kupferdrahtmotor * Super leises Lager * Geringer Stromverbrauch und Umweltschutz * Flammhemmendes Material

src-basierter Laser-SLAM-Stapler automatischer Gabelstapler tr-fl300p , ausgestattet mit einem Kerncontroller der SRC-Serie, kann Paletten, Gabelwaren genau identifizieren, und effizient arbeiten; und verwendet Laser-SLAM-Navigation, kein Reflektor, einfach zu implementieren; Rumpf 360 ° umfassender Schutz + 3D-Hindernisvermeidung zur Verbesserung der Sicherheit des Roboterbetriebs; die Hubhöhe kann angepasst werden,, was eine "Stapelwaffe" in der Fabrik ist; Die maximale Belastung beträgt bis zu 3000 kg, Geeignet für große Fabriken oder Lagerhäuser. Lasthandhabung, Stapel- und Palettierungsszenarien

CNC-Maschine der Hauptteile von: *Das Körpergewicht beträgt 855kg. *Mitsubishi M80-System. *11KW10000 U/min. *24-Arm-Magazine. *X35MM YZ45MM *Japan THK Rollenführung Z-Achse 6 Schieber

Dreirädriger Elektro-Gabelstapler Einführung: 3-Rad-Gabelstapler ist zum Anheben von Standardpaletten mit 1200 kg Tragkraft und 3880 mm Hubhöhe. Dreirädrige Gabelstapler sind eine ideale Einrichtung zum Be- und Entladen von Waren in Stapellagern, Supermärkten, Werkstätten, Produktionslinien oder zum Be- und Entladen von Waren auf/von LKWs, Containern usw.

Hauptmerkmale des Elektronenmikroskops TVN-600II: (1) Vergrößerungsknopf: Drehen Sie den Vergrößerungsknopf, um das Bild je nach Produktgröße auf dem Display in der richtigen Größe anzuzeigen ( 2 ) Lichtquelle: Ringlichtquelle ( 3 ) Einstellknopf nach oben und unten: Passt sich an die Höhe des Produkts an, um ein klares Bild zu liefern ( 4 ) Lichtquellen-Einstellknopf: Passt die Helligkeit der Lichtquelle an ( 5 ) USB-Anschluss: Kann zur Bedienung an eine USB-Maus und zum Speichern von Bildern an eine U-Disk angeschlossen werden

ADTECH 3-6 Achsausgabesteuerungssystem für hochpräzise Bewegungssteuerung System.

AMR-Roboter für Rotationsvortrieb: AMB-800K: Der Rotationsvortriebsroboter AMB-800K ist mit einer Steuerung der SRC-800-Serie im Inneren ausgestattet, verfügt über ein extrem niedriges Chassis, kann zum Anheben und Handhaben in das Regal bohren und hat eine Last von bis zu 800kg. Es kann die Drehung des Roboterkörpers und die Lenkung der angehobenen Güter steuern. Es unterstützt reine Laser-SLAM-Navigation und QR-Code-Soft-Navigation, wodurch ein flexibler Warentransport zwischen bestimmten Standorten, wie E-Commerce-Sortierung, Materialtransfer, Anrufzustellung usw., realisiert werden kann, wodurch Arbeitskräfte freigesetzt und unbemannte Transporte realisiert werden können.

ROKAE SR5: 5kg Nutzlast, 919mm Reichweite, 6-achsiger kompakter kollaborativer Roboter. Ideal für leichte industrielle Montage, Maschinenbedienung und automatisierte Testanwendungen. Partner: ROKAE | TROY Supply.

10KW Windturbinen-Kraftwerk Hauptbereiche einschließlich Körper, Controller, Wechselrichter. Brauchen Sie Batterien, Sonnenkollektoren oder Türme. 10KW Windkraftanlage kann für TV, Beleuchtung, Elektrolüfter, Waschmaschine, Kühlschrank, Reiskocher, Wasserpumpe, Klimaanlage und kleine Dorfbeleuchtung verwendet werden.

Plattform für humanoide Roboter für die unteren Gliedmaßen Modell: TR-SA01 Höhe, Breite und Dicke: 1,35 m 0,35 m 0,25 m Gesamtfreiheitsgrade der Beine: 12 Freiheitsgrade eines einzelnen Beins: 6 Maximales Drehmoment des Kniegelenks: 160 Nm Hohlverdrahtung aller Verbindungen: Nicht erforderlich Gelenk-Encoder: Dualer absoluter magnetischer Encoder Stromversorgung: Externe Stromversorgung und eingebaute Lithiumbatterie 48 V 0,5–1 kWh optional Ladegerät: Kostenlos mit der Maschine Akkulaufzeit: ca. 2 Stunden, je nach Algorithmus und Auslastung Garantiezeitraum: 18 Monate (Kunden müssen für Teile bezahlen)

Die Bedienung der Maschine erfolgt über die Taschenlampentürtaste . Die Taschenlampentür hat 2-6 Tasten , Normalerweise steuert der 6-Punkt-Schalter das schnelle Aufwärts, das schnelle Abwärts, das langsame Aufwärts, das langsame Abwärts, Links- und Rechtsdrehung und das horizontale Vorwärts- und Rückwärtsgehen des Hubwagens. normalerweise innerhalb von 500 kg, kann mit einem manuellen Angmar-Wagen, ausgestattet werden und der Knopfschalter kann nur nach oben und unten betätigt werden . Wenn es über 1 t liegt, kann es mit einem Angmar-Elektrowagen, ausgestattet werden, der nach oben und unten , links und rechts , vordere und hintere Betriebsschalter haben kann.

Roboter Eigenschaften: konfiguriere 300ML spezielles Silikongehäuse präziser Leimspender, präziser Leimauftrag, schnelle Klebereaktion Geeignet für Silikon, gelben Kleber, weißen Latex, Glaskleber, Dichtungsmittel usw. chemische Beständigkeit, starke Haltbarkeit, ausgewogene Beschichtungslinien Am Ende jedes Ausgabezyklus gibt es eine Saugkraft, um das ernsthafte Problem des Klebens zu lösen

SE01 überwindet das Problem des natürlichen Gangs, das die Entwicklung humanoider Roboter lange Zeit behindert hat. Viele Menschen denken, dass Roboter aufgrund technischer Mängel oft den Eindruck von „kaputten Schritten, verbogenen Beinen und abhackenden Füßen“ erwecken, doch SE01 untergräbt dieses Klischee vollständig und ermöglicht es Robotern, frei und mit gleichmäßiger, schneller und gleichmäßiger Geschwindigkeit zu gehen. SE01 kann sowohl im statischen als auch im bewegten Zustand eine beispiellose Eleganz und Energieeinsparung zeigen und so die Verhaltensleistungslücke zwischen Robotern und Menschen erheblich verkürzen.

AGI Humanoid Robot Iron Parameter: Mit einer Höhe von 178 cm und einem Gewicht von 70 kg verfügt es über 82 Freiheitsgrade, davon 22 in den Händen, und ist mit einem selbstentwickelten Turing-KI-Chip ausgestattet, der eine Rechenleistung von 2250 TOPS aufweist.

Vorteile eines vertikalen Parkhauses : ◇ Es spart Platz und kann durch die Belegung von nur 2 Parkplätzen verdoppelt werden. Für den Bau eines dreidimensionalen Parkplatzes ist keine große Fläche erforderlich; ◇ Reibungsloser Betrieb, keine Vibrationen und Geräusche; schnelle Betriebsgeschwindigkeit, kurze Zugriffszeit; ◇ Standardisiertes Mechanismusdesign, reibungsloser Betrieb, sicher und zuverlässig; ◇ Ausgestattet mit Sicherheitsschutzvorrichtungen und Not-Aus-Vorrichtungen, um den sicheren Betrieb von Zugangsfahrzeugen zu gewährleisten; ◇ Ausgestattet mit fotoelektrischer Erkennung, Programmsteuerung, automatischem Zugangsfahrzeug und kann unbeaufsichtigt verwaltet werden; ◇ Einmalige Investition, langfristige Vorteile.

Eigenschaften der einlagigen Bekleidungsstoff-Vibrationsmesserschneidemaschine: *Intelligentes Schneiden mit Kantenerkennung; *Positionierungs- und Schnittgenauigkeit ±0,01 mm; *2000 mm/s Laufgeschwindigkeit; *Für den Datenimport und -schnitt ist keine Vorlage erforderlich.

2026 ZX-Moto 820RR-RS 818 Verschiebung (cm³) 99 / 12000 Maximale Leistung (kW/U/min) 80 / 9500 Maximales Drehmoment (Nm/U/min) 193 Nettogewicht (kg)

Smart Garden Robot Host: Laubbläser-Roboter Rasenmäher Roboter Schneekehrroboter Unabhängig entwickelter, weltweit erster intelligenter Schneekehrroboter für den Garten in Verbraucherqualität

Leistung: 100 W gepulst Anwendbares Material: PVC, Edelstahl, Kohlenstoffstahl, Aluminium, Stein, Metall. Marketingtyp: Pulsed Fiber Laser Cleaner Garantie auf Kernkomponenten: 2 Jahre Kernkomponenten: MOPA-Laser, professioneller Laser Clean Head Abmessungen (L*B*H): 336*129*400mm Gewicht (KG): 12,5 KG Laserfrequenz: 1- 3000kHz Laserausgabemodus : Impuls Faserkabellänge : 5-10m Impulsbreite: 2-500ns Scanbreite : 300mm einstellbare Funktion: Laserentfernung Öl / Rost / Beschichtung Scanmodus: 7 Muster

Parameter des Cobot CS612: sechs Freiheitsgrade, Gewicht 33kg, Belastung 12kg Arbeitsradius 1304 mm Wiederholpositioniergenauigkeit ±0.05mm Höchstgeschwindigkeit 3.0 m/s typische Leistung 500w Schutzart IP54
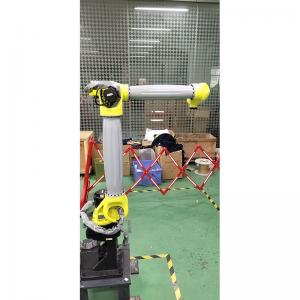
universelle Industrie Robot-UIR Serienroboter wird zum Kommissionieren und Platzieren eingeführt, CNC Anwendungen für maschinelles Zuführen, Sprühen und Bohren !

Inspektion vierbeiniger Mini-Typ von Robot Dog-Anwendungen: Es stellt sich den Anwendungsanforderungen in komplexen und gefährlichen Umgebungen und bietet intelligente Lösungen für Anwendungsszenarien wie Brandbekämpfung und Rettung, Anti-Terror und Anti-Explosion.

MV800 Motorrad sieht aus wie Harley Stil, bequemer Sitz mit starkem Motor mit 800 ccm, V-Zylindern. Fühlen Sie sich wohl mit Ihrem Urlaub bei schönem Wetter

aa Batteriestandard Größe: Durchmesser (D) mm 14 ± 0,5 Höhe (H) mm 50 ± 0,5 Gewicht (W) G 14.1 ± 0,5 einaa Batteriestandard Größe: Durchmesser (D) mm 10.1 ± 0,2 Höhe (H) mm 44.5 ± 0,5 Gewicht (W) G 7.1 ± 0,2

Tageskapazität ca. 100.000 Stück vollautomatische Maskenproduktionslinie von 1 Bediener einfach HMI durch englische Version

Intelligenter AMR-Gabelstapler: Die Produkte der intelligenten Gabelstaplerserie sind mit einem SRC-Kerncontroller ausgestattet und verwenden Laser- SLAM-Navigation, keinen Reflektor. Das gesamte Fahrzeug ist mit einem 360°-Sicherheitsschutz ausgestattet, der Be- und Entladen, Sortieren, Handling, Hochregalstapelung, Käfigstapelung und Paletten erfüllt Stapeln usw. Szenarioanforderungen: Diese Produktserie verfügt über umfangreiche Modelle und eine breite Palette von Lasten, wie Paletten, Materialien. Die Handhabung von Käfigen und Gestellen bietet eine leistungsstarke Lösung.

Laser SLAM Smart AMR Roboter-Gabelstaplertyp: *2 Tonnen Stapelnutzlast; *Maximale Hubhöhe erreicht 3000 mm; *Kompakt und flexibel.

3D-Handheld-Scanner Anwendungen: Ø Automobilherstellung. Ø Luft- und Raumfahrt Ø Energieerzeugung Ø Modellherstellung. Ø Gussinspektion. Ø Baumaschine Ø Konstruktionsinspektion. Ø Architekturskulptur

ROKAE CR7 – 7 kg, 6-Achsen, 988 mm Nutzlast 7 kg Erreichen 988 mm DOF 6-Achsen Wiederholbarkeit ±0,02 mm IP-Schutzart IP67 Anwendungen Präzisionsmontage, Maschinenbedienung, Laborautomatisierung. Marke: ROKAE | Partner: TROY Supply | Hergestellt in China

Das Stratospheric Floating Wind Power System bietet eine Lösung für erneuerbare Energie, die bestehende Energiesysteme hinsichtlich Gesamtkosten und Stabilität übertrifft. Es handelt sich um das weltweit einzige bahnbrechende System für erneuerbare Energien, das in den kommerziellen Betrieb geht, und es soll zum Energiekern der vierten industriellen Revolution der Menschheit werden.

Roboter Anwendungen: ——Material Handhabung, Palettieren, Druckgießen, Montage größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;Minimieren Sie Fehler durch den Roboter visuelle Funktion; (ob es verwendet werden soll) maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung;

Ausrüstung Fetures: * Hochgeschwindigkeitsprozess bis zu 480 Stück / Min. * große Nutzlast des Delta-Roboters um 5kg. * kleineres Design als andere berühmte Marke.

Informationen zur Obstschälmaschine : Produktmodell: TRP-99S Produktgröße: 600 * 600 * 1410 mm Produktleistung: 180–300 Stück /Stunde Produktleistung: 800 W/1600 W Produktgewicht: 100 kg Produktmaterial: Edelstahl 304

Merkmale der Teeverpackungsmaschine: Dichtungsmaterial: PVC Anwendbare Objekte: Alle Arten von Tee. Gesamtproduktgewicht: 180 kg. Vollautomatisch. Produktgröße: 75 x 70 x 150 cm. Nennleistung: 0,8 kW

Hochpräzise Desktop-Roboter und Lötroboter wurden für Produktionslinien für elektrische Komponenten wie Samsung, LG, Foxconn entwickeltund Kanon usw.

1.Es nimmt den neuesten Hochleistungs-Übertragungsmechanismus an, um die Kette anzuordnen und das Hauptantrieb zu treiben. Die Fehler und Geräusche eines anderen Zahnradgetriebes können vermieden werden. 2. Importiertes Controlling-System ist angenommen; Es kann auch mit Erkennungs- und Ablehnungsfunktionsgerät (OMRON Sensor) ausgestattet seinFür die Anzahl der Medikamente nach Benutzer Anforderung. Es nimmt den importierten Frequenzumrichter an. 3. Es nimmt ein fotoelektrisches Controllingsystem an, um PVC, PTP, Aluminium / Aluminium Material, das automatisch gefüttert wird, um automatisch gefüttert zu werden, um automatisch zu schneiden, um die synchrone Stabilität von über- Langstrecken- und multi Sender. 4. Es kann optional mit Photozellkorrekturgerät ausgestattet sein, importierte Steppermotor-Traktion und Image- Zeichen Registrieren, um die Verpackungsnote zu optimieren 5. Die Maschine eignet sich für Industrien von Lebensmitteln, Medikamenten, medizinischen Instrumenten, Hardware, Elektronik usw. für Verpackung.

900cc V-Zwilling Zylinder Riemenantriebe schweres Kreuzfahrtmotorrad

900CC EhrfürchtigStraßenmotorrad MV900S kommt bald ! auf der Suche nach globalen Händlern von weltweit !

QT Series SchokoladentemperiermaschineEinführung: Die Schokoladentemperiermaschine ist ein wichtiges Gerät in der Produktion von reiner Fett-Schokolade. Diese Maschine kann die in jeder Phase des Schokoladentemperierprozesses erforderliche Temperatur automatisch steuern, um die Qualität der Schokolade sicherzustellen.

Der Aerial Shuttle ist ein neues IoT-basiertes Luftlogistiksystem. Es besteht aus intelligenter Planungs- und Überwachungssoftware, Standard-Gleiskomponenten, intelligenten Schienenfahrwerken und Gleisweichen. Das gesamte System ist modular aufgebaut, sodass Planung und Design jeder Einheit zu einem maßgeschneiderten Logistiksystem kombiniert werden können, das den Anforderungen der Kunden und der Baustelle gerecht wird.

Navigation Methode: magnetische Navigation, Magnetstreifencontrol method: integrierte Steuerung Motor: BürstenlosMotor, ≤200W / einstellenLaufwerk Methode: Differentialantriebload method: Latenz AGV

Palettierroboterlösungen für Obstkörbe: *500 kg Nutzlast *3000 mm Arbeitsradius *0,03 mm Wiederholgenauigkeit *Yaskawa-Servosystem *LNC Robotersteuerungssystem

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

* Kompakt Struktur, einfach zu installieren und zu warten * SPS Kontrolle, hochautomatisch * HMI ist einfach zu bedienen * Mehrere Die Positionen sind mit Erkennungssensoren ausgestattet, die zuverlässig Ausnahmen erkennen, um Abfälle zu reduzieren. * Taste Teile und Komponenten verwenden weltbekannte Marken, um die stabile Leistung der Maschine zu gewährleisten * Stabil Laufen und hohe Effizienz

TR-SBA & TR-SBB chirurgisch Untersuchung Einweg-Handschuh-Tauchmaschine und Handschuhverpackungsmaschine Tr-sba Für Einzelformlinie TR-SBB Für doppelte FormlinieGeeignet Materialien: PVC Emulsion \ Latex \ Vlnyl Haupt Produkte: PVC / Latex / Vinyl Handschuhe für Untersuchung, Chirurgie, Einweghandschuh für Haushalt und Perlen, gerade (Pulver / pulverfrei).

Der unbemannte Traktor verwendet SLAM-Technologie (Multisensor-Fusion), beispielsweise Laser-, Sicht- und Satelliten-Trägheitssensoren, und nutzt Anhängertransportausrüstung, um den Warentransfer selbstständig durchzuführen. Dabei deckt er unterschiedliche Arbeitsumgebungen im Innen- und Außenbereich ab und verbessert umfassend die Kapazität und Effizienz der internen Logistik in der Fabrik.

Spezifikationen der Luxusyacht : Produktname: 110-Fuß-Luxusyacht Produkt-Nr.: MHY110 ′ Hauptmaßstab: 33,30 × sechs Komma acht Null × 2,50 m Host-Leistung: 670 PS × 2 Sätze Besatzung: 25 Tiefgang: 0,90 m Geschwindigkeit: 22 kn Navigationsgebiet: Küste

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Die Struktur und Eigenschaften des Lüfters: Diese Gebläseserie hat eine einstufige, einsaugende, freitragende Struktur, angetrieben durch eine Kupplung, der Lufteinlass ist horizontal und axial, und die Richtung des Luftauslasses ist 0° oder 180°. Von der Motorseite aus gesehen dreht sich das Gebläse gegen den Uhrzeigersinn.

Merkmale des Mini-Hubschraubers: 4-cylinder gasoline engine, 1800cc emissions, 120 horsepower, imported engine, lifetime warranty on the entire engine.

Industrieller Delta-Spider-Roboter: 400mm-1200mm Arbeitsdurchmesser 1-3 kg Nennnutzlast KEBA Teach-Pendant

1. Das Motherboard hat 3188 Eingebaute Spiele, einschließlich 100+ 3D-Spiele 2. Die Speicherkarte ist 32G und läuft mit 4 Kernen, ohne einzufrieren oder abzustürzen 3. Unterstützung, um das Spiel auf halbem Weg anzuhalten 4. Schnellsuche Spielfunktion 5. Unterstützung 4 Griffe online 6. Schaltfläche benutzerdefinierte Sortierung 7. HD LCD Bildschirm 8. Unterstützung mehrsprachig Schalten

Servo-Energiespar-Spritzgießmaschinen der TR-Serie: Präzises Spannsystem, hervorragende Effizienz, effizienter Servoantrieb, alle werden allen Anforderungen gerecht. Konzentrieren Sie sich auf Kundenprodukte, bieten Sie den Kunden ein komplettes Set an technischen Lösungen und schaffen Sie bessere Investitionsrenditen und Kundenerlebnisse für globale Kunden.

Anzahl der Leistungsphasen: einphasig Nennleistung: 20 W Feuchtigkeitsfester Weg: offen Kühlmethode: ölgetaucht luftgekühlt Kühlform: flüssigkeits- / ölgetaucht Frequenzeigenschaften: Niederfrequenz Marke: OEM Wicklungsform: Doppelwicklung Kernform: Schale / Kernform

Einführung in die automatische Wafer-Produktionslinie: Vollautomatische Wafer-Produktionslinie mit SPS-Steuerung. Deutsche SEW-Motoren, SKF-Lager, Siemens/Mitsubishi-SPS, lebensmittelechte PU-Förderbänder. 11 Stationen, 54,96 kW Gesamtleistung. Hoher Ausstoß, geringer Energieverbrauch.

Merkmale des robusten, unbemannten Traktormodells T300-H: *EPS elektrische Servolenkung, flexible und präzise Lenkung *Laser SLAM + Totwinkel-Radar-Navigation *Anhängelast bis zu 33 kN, reibungsloser und zuverlässiger Betrieb *Schnellverschluss für einfache Inspektion und Wartung *Leistungsstarker Servomotorantrieb für hohe Parkgenauigkeit *Für den Betrieb bei jedem Wetter geeignet, sowohl im Innen- als auch im Außenbereich.

Unter Berufung auf ein wissenschaftliches Managementsystem, bequeme Transportbedingungen, starke Produktionskapazitäten, Testmethoden und ein perfektes Vertriebsnetz stellt unsere Fabrik eine Reihe von Produkten mit hoher Qualität, niedrigem Preis und schöner App her Leistung für verschiedene Industrie- und Bergbauunternehmen. Hauptgeschäft: eine Vielzahl von hochfesten Ketten; Hebemaschinen; Fördermaschinen; Mine Support-Produkte; Kranteile und Wartungsdienste Schiffskette, grüne Dekorationskette, Edelstahlkette, Becherwerk-Hebezeugkette, Kettenhaken, Trichter, Kettenrad, Plattenkette und anderes Zubehör, Fördermaschinen-FU-Förderzubehör, Kettenförderzubehör, Kratzer Plattenförderzubehör , Schlackenförderer, Schlackenentfernerzubehör, Grubenstützbolzen, Ankerplatten, W-Stahlgurte, Ankerseile, Verankerungsmittel und andere unterstützende Produkte. Die oben genannten Produkte werden verwendet in: Hebe-, Metallurgie-, Kohle-, Erdöl-, Baustoff-, Zement-, Strom-, Chemie-, Schiffbau-, Transport- und Umweltindustrie. Nicht standardmäßige Produkte können an die Bedürfnisse des Benutzers angepasst werden.

Eigenschaften einfache Operation beste Konfiguration mit hoher Leistung lange Armlänge für breite Stellen geeignet maximale Nutzlast 10 kg schnelle Geschwindigkeit mit 0,43S Zykluszeit hohe Präzision bis zu ± 0,015 mm

Laser SLAM Dreh- und Hebe-AMR-Roboter TR-SW1500:Superstarke Belastung von 1500 kg, reibungsloser KI-Transport.

sechs Freiheitsgrade, Eigengewicht 17.5kg, Belastung 6kg Arbeitsradius 914 mm Wiederholpositioniergenauigkeit ±0.03mm Höchstgeschwindigkeit 2.8 m/s typische Leistung 250w schutzgrad ip54 Kollaborativer Roboter ist für Sicherheitskonzept ausgelegt. Mensch und Roboter können gemeinsam an denselben Produktionslinien arbeiten.

【Modell】TR1030B-185 【Aktionstyp 】Mehrgelenktyp 【 Nennlast】30kg 【Bewegungsradius】1850mm 【Gewicht】230kg 【Anzahl der Achsen】4 Achsen

Horizontale automatische EinlegemaschineVorteilsanalyse: 1. Ersatz menschlicher Arbeit 2. Theoretische Geschwindigkeit von 24.000 Weichen/h 3. Einfache Bedienung, hohe Stabilität 4. Flexibler Einsatz der Produktion 5, niedrige Wartungskosten

Unbemannt C Container Merkmale des Transportfahrzeugs: Der TR-CONT70S ist eine neue Generation KI-gestützter Containertransportfahrzeuge. Es ist leichter, niedriger und schmaler und lässt sich dadurch besser an horizontale Kaianlagen anpassen. Ausgestattet mit einem Antriebssystem der Stufe L4 interagiert es effizient mit Kai- und Schienenkranen, Schleusenstationen und automatischen Ladestationen während des gesamten Prozesses und erzielt so Kosteneinsparungen von über 30 % im Vergleich zu herkömmlichen AGVs in automatisierten Terminals.

Anti-Drohnen-Gerät ist für die Flughafenkontrolle, öffentliche Sicherheit ausgelegtKontrolle usw.

Terminator humanoider KI-Roboter TR-T800 – Größenangaben: Höhe: 173 cm Gewicht (inkl. Akku): 75 kg Gesamtzahl der Freiheitsgrade (ohne die Hand, die die Geschicklichkeit steuert): 29 Freiheitsgrade einer Hand: 7 Unterschenkel- und Oberschenkellänge: 91 cm Armlänge: 60 cm Freiheitsgrade des Halses: 2 Freiheitsgrade eines Beins: 6 Freiheitsgrade der Taille: 1 Freiheitsgrade eines Arms: 7

Unter Berufung auf ein wissenschaftliches Managementsystem, bequeme Transportbedingungen, starke Produktionskapazitäten, Testmethoden und ein perfektes Vertriebsnetz stellt unsere Fabrik eine Reihe von Produkten mit hoher Qualität, niedrigem Preis und schöner App her Leistung für verschiedene Industrie- und Bergbauunternehmen. Hauptgeschäft: eine Vielzahl von hochfesten Ketten; Hebemaschinen; Fördermaschinen; Mine Support-Produkte; Kranteile und Wartungsdienste Schiffskette, grüne Dekorationskette, Edelstahlkette, Becherwerk-Hebezeugkette, Kettenhaken, Trichter, Kettenrad, Plattenkette und anderes Zubehör, Fördermaschinen-FU-Förderzubehör, Kettenförderzubehör, Kratzer Plattenförderzubehör , Schlackenförderer, Schlackenentfernerzubehör, Grubenstützbolzen, Ankerplatten, W-Stahlgurte, Ankerseile, Verankerungsmittel und andere unterstützende Produkte. Die oben genannten Produkte werden verwendet in: Hebe-, Metallurgie-, Kohle-, Erdöl-, Baustoff-, Zement-, Strom-, Chemie-, Schiffbau-, Transport- und Umweltindustrie. Nicht standardmäßige Produkte können an die Bedürfnisse des Benutzers angepasst werden.

ROKAE CR20-17C-5 — 17 kg, 5-Achsen, 2047 mm Nutzlast 17 kg Erreichen 2047 mm DOF 5-Achsen Marke: ROKAE | Partner: TROY Supply

ADTECH 3-6 Achsausgabesteuerungssystem für hochpräzise Bewegungssteuerung System.

Elektron Mikroskop Features: * LED-Ringlichtquelle, dynamische Anpassung * Automatische Kantenfindung. * Automatische Kreisfindung. * Bild Speichern und exportieren * Daten speichern und exportieren * Zoom ohne Unschärfe

Merkmale des Transformatormodells TR-M630/10: Der ölgekühlte 630-kVA-Transformator hat sich aufgrund seiner hohen Wirtschaftlichkeit, Zuverlässigkeit und Wartungsfreiheit als Klassiker in der Mittel- und Niederspannungsverteilung etabliert. Wenn Sie eine wirtschaftliche, praktische, stabile und langlebige Lösung für die Energieverteilung suchen, ist die TR-Serie eine ausgezeichnete Wahl.

Elektronenmikroskop Modell: TVN-9218/9118 Merkmale: Auflösung: 1920 x 1080 Bildrate: 60 fps Optische Größe: 1/3 Zoll Netzwerkschnittstelle: Keine Videoschnittstelle: HDMI E/A-Schnittstelle: Keine USB-Schnittstelle: 1 Speichermethode: SD-Kartenspeicher

Entsalzung ist die Verwendung von Meerwasserentsalzungen, um frisch zu produzieren. Es ist eine Inkremental-Technologie von Open Source, um die Nutzung von Wasserressourcen zu realisieren. Es kann die Gesamtmenge an frischem Wasser erhöhen, ohne von Zeit, Raum und Klima betroffen zu sein. Die Wasserqualität ist gut und der Preis ist allmählich angemessen. Es kann die stabile Wasserversorgung garantieren, wie Trinkwasser für Küstenwohnküste und Industriekesselwasser Lieferung. Der Prozess der Erlangung von Süßwasser aus Meerwasser wird als Entsalzung bezeichnet. Die derzeit verwendeten Meerwasserentsalzungsmethoden umfassen Meerwassereinfrieren, Elektrodialyse, Destillation und Reverse Osmose. Die aktuelle Umkehrosmosemethode mit umgekehrten Osmosemembranen beanspruchen schnell den Markt aufgrund seiner einfachen Ausrüstung, ein einfacher Wartung und modularer Ausrüstung und ersetzen sie allmählich das Destillationsverfahren ist das am häufigste verwendete Verfahren.

Troy Schweißroboter mit gutem Preis, beliebt MIG Schweißroboter Auftrag (15 Monat Garantie)

【Modell】TR1006A-15MZ 【Aktionstyp 】Mehrgelenktyp 【 Nennlast】6kg 【Bewegungsradius】1500mm 【Gewicht】150kg 【Anzahl der Achsen】6 Achsen

1. This Maschine ist ein automatischer Stirnbandtyp KN95 Maskenproduktionslinie, die automatisch mehrschichtig erzeugt Masken mit Doppelfalte Ohren; 2. gefahren von Mitsubishi Servomotor mit hoher Stabilität; 3. Das Gerät verwendet ein Marken-Ultraschallschweißgerät, das eine gute Schweißwirkung, eine gute Stabilität und eine geringe Ausfallrate aufweist 4. Panasonic SPS Programmiersteuerung, Servosteuerung, hoher Automatisierungsgrad, hohe Leistung und gute Stabilität; 5. Eine intelligente Materialversorgung erkennt durch die Installation von Sensoren die Erkennung der Materialproduktion, und die Maschine stoppt und gibt einen Alarm aus, wenn es gibt kein Material; 6. Nase Linie: automatische Linienzufuhr und Schneiden; 7. Logo-Pad-Druck, spezielles Logo oder Muster können gemäß den Anforderungen angepasst werden 8. Automatisieren Sie automatisch das Zuführen des linken und rechten Ohrriemens, das Schneiden der Last und das Ultraschallschweißen 9. Falten Sie den Stoff, der in zwei Hälften verarbeitet wurde, in zwei Hälften 10. durch die Form wird der gefaltete Stoff weiter verarbeitet Endprodukte

Anwendungen für Hochgeschwindigkeits- Runddruckmaschinen: Für Fässer, Plastikbecher und runde Gegenstände. Über 1000 Stück/Minute.

UV-Desinfektion ai Roboter ist für Krankenhäuser und öffentliche Einrichtungen geeignet gut in der Kontrolle mit dem Virus wie H1N * und COVID-19 durch Luftmedien verbreiten

AMR-Parkroboter beendet wirksam den Kohlenstoffausstoß von Autos auf dem Parkplatz, stellt der Gesellschaft kostengünstige, umweltfreundliche Zusatzparkplätze zur Verfügung, bietet den Benutzern einen Fahrdienst ohne Umweltverschmutzung und ohne Wartezeiten und spart den Investoren Bau- und Betriebskosten. Die Lösung wird häufig in Bereichen mit statischem Verkehr eingesetzt, in denen Parkplätze knapp sind, beispielsweise in gewerblichen Bürobereichen, Flughäfen, Hochgeschwindigkeitsbahnhöfen, Krankenhäusern und Wohngebieten.

ADTECH CNC9620 / 4620 2 Achsen Drehen / Drehmaschine Maschine CNC Steuersystem für CNC Drehmaschine und Drehsystem

Merkmale der bemannten fliegenden Untertasse: Maximale Reichweite: 6 km. Anzahl der Passagiere: 2 Personen (75 kg/Person). Vorteile fliegender Untertassen: Vollständig geschlossenes Sicherheitsdesign, cooles Aussehen, Start- und Landemöglichkeiten im Wasser.

Funktionen des LiDAR 3D SLAM AGV: 3D-Erkennung, Rundum-Sicherheitsschutz; LIDAR 3D SLAM AGV kann in der Fabrikautomatisierung, Lagerautomatisierung, Hafenautomatisierung und anderen Anwendungen eingesetzt werden und hebt Automatisierungsvorgänge auf ein neues Niveau.

Gesamtlänge: 108 cm; Klingenlänge: 73 cm; Grifflänge: 29 cm; Klingenbreite: 3,8 cm; Dicke: 0,5 cm; Gewicht ca.: 1300 g; Klingenmaterial: Hochleistungs-Manganstahl; Mantelmaterial: Ummantelung aus Massivholz; Gewicht ohne Scheide: 1000 g; Griffmaterial: Massivholz; Kabelanschlüsse: PC-ABS.

TR-G30 Kollaborativer Roboter: Der TR-G30 Cobot ist ein großer kollaborativer Roboter, der hauptsächlich zum Be- und Entladen von Werkzeugmaschinen, Palettieren, Montieren und zur Handhabung großer Lasten eingesetzt wird. Die Wiederholgenauigkeit der Positionierung beträgt ±0,05 mm und erfüllt damit die Anforderungen industrieller Szenarien mit höheren Lasten!

Inspektion wasserdichter Roboterhund TR4D-20 Anwendungen: führende digitale Industrielösungen, Definieren Sie eine neue Grenze für Vierbeiner Roboteranwendungen. *Sicherheitsinspektion *Umfrageerkundung *Notfallrettung

KI-Bildmessgerät Anwendungsbereich: Bieten Sie effiziente und vollständige Messlösungen für High-End-Kunden, geeignet für die heimische Militärindustrie, Luft- und Raumfahrt, Automobilmotoren, wissenschaftliche Forschungsinstitute, Halbleiter, Chips, Präzisionselektronik und andere High-End-Fertigungsindustrien. Entwickeln Sie ausschließlich KI-gesteuerte intelligente Erfassungs- und Edge-Grabbing-Algorithmen, um eine automatische Erkennung und Messung aller Oberflächenmerkmalsgrenzen zu erreichen.

Palettierroboter-Lösungen für das Aufnehmen und Platzieren von großen Platten: *200 kg Nutzlast *3000 mm Arbeitsradius *0,03 mm Wiederholgenauigkeit *Yaskawa-Servosystem *LNC Robotersteuerungssystem

Produktion Modell: Tassenart Geschwindigkeit: 25 + PC / min Mangelrate Produktion: weniger als 1% Gesichtsmaske für Erwachsene Größe.

src-basierter Laser-SLAM-Kleinstapler, automatischer Stapler,, ausgestattet mit internem Core-Controller der SRC-Serie; mit Laser-SLAM-Navigation, kein Reflektor, einfach einzusetzen; Palettenidentifikation, genauer Gabelstapler; flexible Planung, kann nahtlos mit dem Planungssystem verbunden werden; schlanke Karosserie, kleiner Wenderadius, geeignet für Anwendungen in schmalen Kanälen; Dreidimensionaler 360°-Sicherheitsschutz mit 3D-Hindernisvermeidung, Sicherheitsberührung und anderen Sensoren,, der der einzige für die Handhabung, Stapelung, Stapelung und andere Arbeitsanforderungen der Sichuan-förmigen Palettenauswahl ist[4 ]
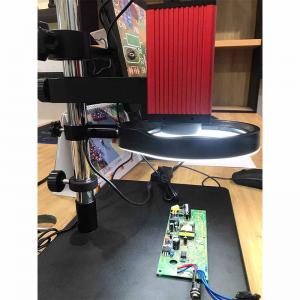
Funktionen des Autofokus-Mikroskops: * Eingebautes präzises optisches Fokussiersystem – alles in einem * Softwareschneller Algorithmus * Autofokus in Echtzeit, innerhalb des einstellbaren Bereichs, keine Anpassung erforderlich * Präzise Bildwiedergabe mit Autofokus

OEM elektrisch Mask: Power (W): 0,5 Watt Spannung (v): 5V Macht Quelle: Batterie, USB, elektrisch Materialien: Pp und Silikon Funktion: Luftreiniger und Anti-Nebel Rauchvirus

Roboterarm Anwendungen: ——Material Handhabung und Palettierung größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit; feste Automatisierung

Die geschickten Hände der TR-BOTRH/LH-Serie verfügen über eine starke Greifkraft und mäßige Geschwindigkeit und eignen sich für Greifvorgänge von Robotern oder Prothesen. Unterstützt ROS und stellt ROS-Plug-Ins bereit.
TRE5-8CO ist ein vertikaler 6-Achsen-Mehrgelenk-Cobot mit einer Nutzlast von 5 kg. Es kann sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen und kann fünf oder sechs Achsen nach Kundenwunsch anpassen. TRE5-8CO Cobot ist leicht verständlich und hat eine solide Struktur, um die Anforderungen der Kunden nach Produktdiversifizierung, hoher Effizienz und Produktproduktion zu erfüllen.

Dreirädriger elektrischer Gabelstapler Einführung: Der 3-Rad-Gabelstapler ist zum Heben von Standardpaletten mit einer Tragfähigkeit von 500 kg und einer Hubhöhe von 2150 mm ausgelegt. Der Mini Electric Forklift ist eine ideale Einrichtung zum Be- und Entladen von Waren in Stapellagern, Supermärkten, Werkstätten, Produktionslinien oder zum Umschlagen von Waren auf / von Lastwagen, Containern usw

ROKAE CR20C xMate – 20 kg, 6-Achsen, 1798 mm Nutzlast 20 kg Erreichen 1798 mm DOF 6 IP IP67 Marke: ROKAE | Partner: TROY Supply

Leistung: 5W Reichweite: über 2000m Batterietyp: 18650 * 2 Lithium BatterieDimension: Länge 21,5 cm * Durchmesser 4cm.

2-Achs-Stanzen CNC Controller-Unterstützung mehrsprachig Option, mit Bearbeitungsfunktion für Cam Template Guide, einfach zu bedienen. Unterstützung der Auflösung von Cam-Dateien Prozess.

Mittelgroße SPS der Serie AM400 Produktleistung: eingebauter Ethercat-Bus *kann 4 oder 8 Servoachsen bringen (am401 kann 4 Achsen bringen, AM402 kann 8 Achsen bringen), unterstützt synchrone Positionierung, elektronische Kurvenscheibe, Interpolationsfunktion. *kann 125 Racks gleichzeitig erweitern, kann 32000 IO-Punkte erweitern.

TR-IX2 Pro Drahtlose Infrarot-Wärmebildkamera für Mobiltelefone: Die TR-IX2 Pro ist eine neuartige, kabellose Infrarot-Wärmebildkamera für Mobiltelefone, kompatibel mit Android- und iOS-Geräten, mit einer Reichweite von bis zu 30 m. Sie bietet eine Wärmebildauflösung von 256 × 192 Pixeln, die durch 4-fache KI-Echtzeit-Superauflösung auf 512 × 384 Pixel erhöht werden kann. Ein 7-mm-Objektiv mit einstellbarem Fokus sorgt für klare Bilder im Nah- und Fernbereich. Die KI-Sprachsteuerung Xiao Rui ermöglicht eine schnelle Parametereinstellung. Geeignet für Anwendungsbereiche wie die Prüfung von Leiterplatten, elektrische Wartungsarbeiten, Geräteinspektionen und die Lecksuche in HLK-Anlagen.
Der 6-Achsen-Roboter unterstützt PC, Mobiltelefon, Programmierhandgerät, Sprache, APP und andere intelligente interaktive Steuerungsmethoden.

Funktionen des Ganzkörper-Exoskelett-Roboters TR1: Höhe: 190 cm; Freie Achse: 27; Sechs-Achsen-Kraftsensor: 4-8 Stück; N.W. 120kg; Akkulaufzeit: 2 Stunden; Maximale Tragfähigkeit am Ende: 40 kg; Chip-Rechenleistung: 275 TPOS.

Zusätzlich zu den vertikalen Start- und Landefunktionen herkömmlicher Rotordrohnen bieten die UAVs der Dual-Rotor-Serie auch die Vorteile einer kompakten Struktur, eines geringen Gewichts, einer hohen Tragbarkeit, einer hohen Effizienz und einer langen Lebensdauer. Geeignet für Aufklärungs-, öffentliche Sicherheits-, Militär- und Geheimdienstmissionen.

Was macht Roboterwelpe für Sie? Videoüberwachung, visual line patrouill, Ultraschall-Hindernisvermeidung, Selbstbetrag Steuerung, Bewegungserkennung,Farbe Anerkennung.

ROKAE SR3C: 3kg Nutzlast, 705mm Reichweite, 6-Achsen xMate kollaborativer Roboter mit integrierter Kraftsensorik. Ultrakompakter Tisch-Cobot für präzise Elektronikmontage, Laborautomatisierung und empfindliche Bauteilhandhabung. Partner: ROKAE | TROY Supply.

Mechanisches Laserradar mit 32 Linien: 360° dreidimensionale präzise Wahrnehmung Das hochintegrierte modulare Design bietet Ihnen eine stabilere und zuverlässigere Leistungsgarantie

am besten 900CC Motorrad in China 2020 !

Hochleistungs-Agi Humanoid Roboter Tr-Star 1: *Freiheitsgrade: 55 *Maximale Gelenkdrehzahl: 25 rad/s *Größe/Gewicht: 171 cm/63 kg *Gesamtmaschinenlast: 160 kg+ *Maximales Gelenkdrehmoment: 400 nm *5 Finger Hand: vollständig selbstfahrende Gelenke / 12 unabhängige Freiheitsgrade.

V-Zylinder Motor klassisches Motorrad für anständige Jungs. Weltweite schwere Motorradhändler werden gesucht !

Ähnlich wie deine echte Freundin Individuelle Anpassungsmöglichkeiten bei Körperform, Gesichtsausdruck und Augenfarbe usw. Warm Körperfunktionen Fließend Englisch und Chinesisch

*Robotervorteile: schnelle Geschwindigkeit, hohe Präzision *Lange Lebensdauer und stabile Leistung *Starke Kompatibilität und starke Flexibilität *Einfache Steuerung und Benutzerfreundlichkeit

ROKAE CR12-20 – 20 kg, 6-Achsen, 1434 mm Nutzlast 20 kg Erreichen 1434 mm DOF 6-Achsen IP IP67 Marke: ROKAE | Partner: TROY Supply

ROKAE CR18 – 18 kg, 6-Achsen, 1062 mm Nutzlast 18 kg Erreichen 1062 mm DOF 6-Achsen IP IP67 Marke: ROKAE | Partner: TROY Supply

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Raupenroboter für Entwässerung und Wasserversorgung: Entwässerungs- und Wasserversorgungsroboter werden hauptsächlich zur Hochwasserentwässerung und -rettung in begrenzten städtischen Räumen eingesetzt, beispielsweise in Tiefgaragen, unterirdischen Einkaufszentren, Kellern von Wohngebäuden, U-Bahn-Stationen, Tunneln, Durchlässen und Unterführungen.

Produktion Modell: Fisch Stil. Geschwindigkeit: 80-100 pc / min Fehlerrate Produktion: weniger als 4 % Gesichtsmaske für Erwachsene Größe.

Arm Länge: 2300mm; Nutzlast: 50kg; geeignet für schwere Nutzlast Palettieren Arbeit, einfache Bedienung durch unseren Teach-Anhänger

Vollständig selbstreinigende KI-Technologie: Die auf semantischem Sehen basierende Glas-vSLAM®-Technologie kann eine millimetergenaue Positionierung und Navigation auf der Oberfläche von Komponenten nur durch das robotereigene KI-Vision-System realisieren, ohne Modifikation, Vorab-Mapping und Personalüberwachung, autonome Wahrnehmung, Planung und Entscheidungsfindung , und perfekte Reinigungsautomatisierung. Gleichzeitig garantiert es eine extrem hohe Sicherheit und Robustheit.

Der Sicherheitspatrouillenroboter verfügt über vier Kerntechnologien mit unabhängigen geistigen Eigentumsrechten, die ein intelligentes neues Sicherheitsmodell für die Zusammenarbeit von Mensch und Maschine schaffen und der Polizei helfen, sich durch Wissenschaft und Technologie weiterzuentwickeln. Derzeit haben Patrouillenroboter sehr ausgereifte Anwendungen in Flughäfen, Bahnhöfen, Supermärkten, Fußgängerzonen und anderen Szenarien.

ROKAE CR20-25C-5 — 25 kg, 5-Achsen, 1798 mm Nutzlast 25 kg Erreichen 1798 mm DOF 5-Achsen Marke: ROKAE | Partner: TROY Supply

1. Es wird eine Aluminiumlegierungsstruktur verwendet, die ohne Rost schön und fest ist 2. Computer SPS Programmiersteuerung, hohe Stabilität, niedrige Ausfallrate und geringes Rauschen 3. importierten Servomotor, Schrittmotorantrieb, hohe Präzision übernehmen. 4. photoelektrische Detektion von Rohstoffen, um Fehler zu vermeiden und Abfall zu reduzieren 5. Die Maschine verwendet zum Bewegen und Befestigen Hochleistungsrollen und Polsterfußschalen, die bequem und schnell zu bewegen sind, ohne den Boden zu schütteln oder zu verletzen 6. Das Modell ist mit einem neuen fortschrittlichen Förderband ausgestattet, das Produkte automatisch mit hoher Genauigkeit sammelt und nur sortiert und verpackt werden muss

Produkt Beschreibung: Der TR-1500V20 Besaitungsmaschine ist eine automatische Ausrüstung, die die gut getesteten schweißtZellen in Fäden durch Verbindungsstangen und sortiert und sammelt die geschweißten BatteriekettenDas Gerät verwendet verschiedene fortschrittliche Automatisierungstechnologien wie PLC und Servo, um eine vollautomatische Verarbeitung von zu realisierenBatteriechip-Zufuhr zum Batteriestrang Entladung.

Ausstattungsprinzip: Die Galvanometer-Laserschweißmaschine ist eine perfekte Kombination aus dem Galvanometer-Bewegungssystem und dem Laserschweißmaschinensystem. Der Laser realisiert die schnelle Bewegung des Laserspots durch die Oszillation des Galvanometers und kann so eine hohe Geschwindigkeit jeder Grafik auf der Schweißebene innerhalb des Schweißbereichs erreichen Hochpräzises Punktschweißen und kontinuierliches Schweißen.
Elektrische Mikroskop TVN-600II_A Hauptmerkmale:Funktion 1: Taschenlampe;Lösen Sie das Problem der unklaren Schriftarten auf PCBA -ChipsFunktion 2: Tiefe der Feldsynthese;Lösen Sie das Problem der verschwommenen Anzeige verschiedener FeldtiefenFunktion 3: Lichtquellenschutz;Lösen Sie das Problem der Reflexion der FPC -Softboard, die die Beobachtung beeinflusstFunktion 4: Ethernet -Port;Es ist bequem, Bilder zu übertragen, und es gibt kein Problem, USB -Scheibe abzulehnen.

KI-Ontologie im intelligenten Zeitalter GR-1: Verkörperte Intelligenz kombiniert künstliche Intelligenztechnologie mit Robotereinheiten und verleiht dem „Gehirn“ einen kontrollierbaren, wahrnehmbaren, interaktiven und umsetzbaren „Körper“. GR-1 verfügt über ein hoch skalierbares Design, das eine stärkere Verifizierung von KI-Modellen und Algorithmen ermöglicht und großes Potenzial für verschiedene Anwendungsszenarien wie Industrie, Rehabilitation, Heim und wissenschaftliche Forschung bietet.

Boot Technische Daten: Artikel Name: 68-Fuß LuxusjachtArtikel Anzahl: Tr-my68 Main Abmessungen: 20.60 × 4,80 × 2,40m Host Leistung: 370HP × 2; Crew: 12 Menschen Entwurf: 1,0 m; Geschwindigkeit: 18kkn Navigation Gebiet: Binde River B-Ebene

KartonierungMaschine, Auspackmaschine, Kartonierung Maschine, Kartonversiegelungsmaschine, Versiegelungsmaschine, Palettierer, Umreifungsmaschine, Folienverpackungsmaschine und Fließbandanpassung des gesamten Anlagenverpackungsschemas, die angewendet werden kann auf: Lebensmittel, Alltagsbedarf, Kosmetik, Spielzeug, Elektronik, Chemie und Pharmazie, Schreibwaren, Baustoffe, Eisenwaren und andere IndustrienAlle Produktreihen werden im ganzen Land verkauft und nach Amerika, Europa, Südafrika, in den Nahen Osten und nach Australien exportiert

* Biochemisch Verteidigung * Tränengasabwehr * COVID-19 Verteidigung durch N95 Filter * Vermeidung von Umweltverschmutzung * Abwehr von Infektionskrankheiten in der Luft

Intelligenter Parkroboter BESCHREIBUNG: Der Klemmautotransporter ist ein Autotransportgerät, das die Autoreifen ein- und ausklemmt. Im Vergleich zu herkömmlichen Autotransportern ist er ultraleicht, ultradünn und passt sich gut an Boden und Gleise an. Er zeichnet sich außerdem durch hohe Transportgeschwindigkeit und kurze Klemmzeit aus. Er kann effektiv in vielen Arten mechanischer Parkhäuser eingesetzt werden, z. B. für Flugzeugbewegungen, Gangstapelung, Turmlager und Autotransport.

Hochpräzise multifunktionale CNC-Schneidemaschine speziell für die Massenproduktion entwickelt: Elektronische Sicherheitsvorrichtung Diese Schneidemaschinenserie eignet sich für die Bekleidungsindustrie, Schuh- und Hutindustrie, Gepäckindustrie, Automobilinnen- und Heimindustrie, Sofa-/Sitzindustrie, Plüschtierindustrie sowie Verbundstoffe und kann eine Standarddicke von 7 cm erreichen nach der Adsorption. Diese Schneidemaschine verfügt über eine hervorragende Schnittgeschwindigkeit und bietet die höchste Genauigkeit unter ähnlichen Schneidemaschinen. Es verfügt über hervorragende energiesparende, kohlenstoffarme und intelligente Hochtechnologie.
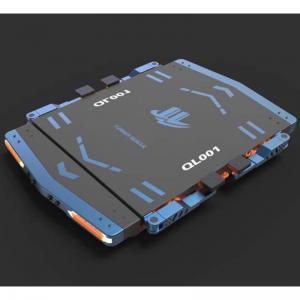
AMR-Parkroboter beendet wirksam den Kohlenstoffausstoß von Autos auf dem Parkplatz, stellt der Gesellschaft kostengünstige, umweltfreundliche Zusatzparkplätze zur Verfügung, bietet den Benutzern einen Fahrdienst ohne Umweltverschmutzung und ohne Wartezeiten und spart den Investoren Bau- und Betriebskosten. Die Lösung wird häufig in Bereichen mit statischem Verkehr eingesetzt, in denen Parkplätze knapp sind, beispielsweise in gewerblichen Bürobereichen, Flughäfen, Hochgeschwindigkeitsbahnhöfen, Krankenhäusern und Wohngebieten.

6-Achs-Industrieroboter für CNC Maschinenfütterungszweck, 15 Monate Garantie würde gegeben werden !

ROKAE CR35-45C: 45 kg Nutzlast, 1947 mm Reichweite, 6-Achsen-xMate-Kollaborationsroboter. Der leistungsstärkste Cobot im ROKAE-Portfolio für schwere Palettierung, Motorenmontage und industrielles Materialhandling. Integrierte Kraftsensorik für kontrollierte Platzierung schwerer Bauteile. Partner: ROKAE | TROY Supply.

TR-M2 Rohrnetz-Inspektionsroboter: Lokalisieren Sie schnell innere Strukturdefekte von Abflussrohren. Erfüllen Sie die Inspektionsanforderungen konventioneller und komplexer Pipelines. Durch Schnelltests werden Testberichte erstellt.

Doppelsitze Hubschraubermerkmale: 4-Zylinder-Benzinmotor, 1800 cm³, 120 PS, Importmotor, lebenslange Garantie auf den gesamten Motor.

Automatische Fischschneiden und Skalierung Maschine: Modell: TR-017 Artikel Verwendung: Schneiden Sie Fisch zurück und entfernen Sie FischwaagenEingang Spannung: 220V / 380V Summe Leistung: 1.5kw Maße : 600 * 600 * 950 (mm) After-Sales Service: ein Jahr Garantie und Lebensdauer Wartung.

Merkmale der Produktionslinie für Lithium-Ionen-Batterien : Bei der Ausrüstung handelt es sich um eine Produktionslinie für Blade-Akkupacks, die automatisch von AGV transportiert wird und Produktionsprozesse wie Kartonzuführung, Kleben, Kabelbauminstallation und Prüfung realisiert. 1. Kompatibilität: 18650 und 21700 können hergestellt werden (kann entsprechend den Kundenbatterien angepasst werden) 2. Hohe Schweißausbeute: importierte KS-Aluminiumdrahtschweißmaschine wird übernommen; mit selbstprüfender Drahtziehfunktion

Anwendungen für automatische Ballonverpackungsmaschinen : Geeignet zum Verpacken von Pellets, Riegeln und gehirnförmigem Material. Wie Pufffutter, Süßigkeiten, kleine Kekse, Gemüsescheiben, Nüsse, frittiertes Material, Tiernahrung, Kleinteile usw.

tr5-7co ist ein vertikaler Mehrgelenk-Cobot mit 6 Achsen und einer effektiven Traglast von 5 kg., der sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen lässt, und fünf oder sechs Achsen je nach Kundenwunsch anpassen kann. tr5-7co cobot ist einfach zu verstehen und hat eine solide Struktur, um die Anforderungen der Kunden nach Produktdiversifizierung, hoher Effizienz, und Produktproduktion. zu erfüllen

Einsatzbereich: Verarbeitung von Calciumcarbonat-Zerkleinerung, Verarbeitung von Gipspulver, Entschwefelung von Kraftwerken, Pulverisierung von nichtmetallischen Erzen, Aufbereitung von Kohlepulver, usw.. Material: Quarz, Feldspat, Calcit, Talk, Schwerspat, Fluorit, Seltene Erden, Marmor, etc.

Kugelförmiger Roboter Dynamische Inspektion: Der kugelförmige Roboter bewegt sich sanft und flexibel, ist leicht zu steuern und kann auf verschiedenen Straßenoberflächen eingesetzt werden; Die geschlossene Kugelschale verfügt über starke Selbstschutzfähigkeiten und ist umkippsicher. Der Roboter nutzt fortschrittliche Steuerungsalgorithmen, um sich in verschiedenen Szenarien flexibel bewegen zu können.

Spezifikationen des bionischen humanoiden KI-Roboters TR-S02: Höhe: 169cm Gewicht: 69kg Maximale Gehgeschwindigkeit: >1,2 m/s Batterie: 700 Wh Volle Körperfreiheit: 40+ aktive Freiheit Bionischer Kopf: 26+ Freiheit Ausdruck: 80 %+ Ausdruck Umdrehung: 60cm Breite Arbeitstemperaturbereich: 10 ~ 40 °C Akkulaufzeit: >2h

Roboter Eigenschaften: großer Arbeitsraum stabile Leistung schnell rennen gute allgemeine Leistung modularer mechanischer Aufbau

Produktionslinie für Damenbinden: kundenspezifische Spezifikation; SPS-Steuerungssystem,Bedienung auf dem Touchscreen, HDTV-Monitor konfigurieren. Deutschland Automatisches Bahnführungssystem BST (optional).

Der kollaborative Roboter AUBO-i5FB kann die Anforderungen leichter Operationen erfüllen. Nutzlast 5kg, max. Länge 1008 mm, max. Erreichen Sie 886,5 mm. Breiter Anwendungsbereich, reichhaltige Konfiguration, das Ende kann eine Drehung um ± 360 ° realisieren.
Das Federsteuerungssystem TH08R ist ein multifunktionales, wirtschaftliches eingebettetes numerisches Steuerungssystem, das von Adtech entwickelt wurde und für 2-4-Achsen-Universalmaschinen, Federkompressionsmaschinen und Federtorsionsmaschinen geeignet ist.

Merkmale der automatischen Umreifungsmaschine : Die automatische Umreifungsmaschine bietet die Vorteile einer hohen mechanischen Fertigungspräzision, einer strengen Struktur, einer festen Verpackung, einer hohen Geschwindigkeit, einer geringen Ausfallrate und einer langen Lebensdauer. Es kann in Verbindung mit einer Montagelinie verwendet werden, um eine automatische Verpackung zu realisieren.

ADTECH 4 Achsen SCARA Roboterarm mit hoher Leistung und ausgezeichneter Präzision

Anwendungsbereich für die Gewichtskontrolle : Die automatische Gewichtsmaschine eignet sich zum Testen, ob das Gewicht eines einzelnen Produkts qualifiziert ist, und wird häufig in den Bereichen Elektronik, Pharmazeutika, Lebensmittel, Getränke, Gesundheitsprodukte, tägliche Chemikalien, Leichtindustrie, Landwirtschaft usw. eingesetzt Nebenprodukte und andere Branchen. Zum Beispiel Konditionierungsprodukte, Gebäck, Schinkenwürste, Instantnudeln, Tiefkühlkost, Lebensmittelzusatzstoffe, Pigmente, Modifikatoren, Konservierungsmittel usw. in der Lebensmittelindustrie.

TR-R6 Kollaborativer Roboter:Leichter kollaborativer Roboter, geeignet für industrielle Anwendungen wie Schrauben, Be- und Entladen, Schleifen usw. Wiederholgenauigkeit ±0,02 mm, absolute Positioniergenauigkeit ±0,5 mm, ein leistungsstarkes Werkzeug für die Automatisierungstransformation im industriellen Bereich!

MIG / WIG Schweißroboter kann als Radius auf 1850mm gearbeitet werden, geeignet zum Schweißen von Stühlen oder Möbeln !

Die Hauptfunktionen des Sanitärroboters: 1, Intelligente Identifikation 2, schnelle Positionierung 3, genau greifen Müllsortierroboter, können verschiedene Arten von Müll zum Sortieren identifizieren und in verschiedene Mülltonnen werfen

Merkmale des Jacking AMR MINI-Gabelstaplers: *Europäische StandardpaletteAnpassbar an EPAL-Europa-Standardpalette * Dock-Typ-Docking Aktive Teleskopgabel *Hohe Sicherheit 360°-Hindernisvermeidung per Laser, Gabelspitzenschutz, uvm. *Schmale Gassendurchfahrt APR-Rotation vorhanden

10W drahtloses Mobiltelefon Ladegerät; AluminiumMaterial, Schnellladung wie bei USB Kabel Laden; Iphone, Samsong, Huawei usw. mehr als 250 Telefonmodelle können unterstützt werden CE 、 FCC 、 RoHS Zertifizierungen

Forst-RC-Roboter Anwendungsszenarien: Damit können brennbare Materialien unter dem Wald entfernt, Waldbrandschutzgürtel und Brandgräben geöffnet, Unkraut entfernt und Brandschutzgürtel auf Grasland geöffnet, Unkraut und Sträucher an Böschungen entfernt und Sicherheitsrisiken rechtzeitig beseitigt werden. Außerdem kann es zum Transport von Materialien in Bergdschungeln eingesetzt werden, wodurch manuelle Transporte ersetzt und die Effizienz der Brandbekämpfung verbessert wird.
TR5-850 ist eine 4-Achse vertikal Multi-Joint Roboter mit einer effektiven Stanzlast von 5kg. Es kann sich an eine Vielzahl unterschiedlicher Anwendungsszenarien anpassen und können je nach Kundenfutter fünf oder sechs Achsen anpassen. Das TR5-850 Das Produkt ist leicht zu verstehen und hat eine solide Struktur, um den Anforderungen der Kunden für Produktdiversifizierung, hohe Effizienz und Produktproduktion zu erfüllen.

Merkmale des leisen industriellen DC-Lüfters: *Kupferdrahtmotor * Super leises Lager * Geringer Stromverbrauch und Umweltschutz * Flammhemmendes Material

Pipeline-Inspektionsroboter Funktionale Merkmale: Der Rohrnetz-Inspektionsroboter TR-S2 verfügt über ein exklusives, patentiertes Design mit dualem Spiralantrieb und eignet sich für die bildgebende Inspektion von Rohren und Hohlkastendurchlässen mit einem Durchmesser von DN600 oder größer. Für den Einsatz im Wasser kann er mit Unterwassersonarsonden ausgestattet werden. Die intelligente Software des Steuerterminals integriert mehrere Inspektionsfunktionsmodule, die eine Datenüberlagerung ermöglichen und schnell Inspektionsberichte erstellen.

ADTECH QS7 AC-Servoantriebe und -Motoren der Serie sind für die Nachrüstung CNC geeignetMaschinen und Linearmodule !

Die hohe Konfiguration unseres Delta-Roboters gewährleistet mit hoher Leistung und hoher Kostenleistung: *Durch Verwendung von importiert aus Japans Panasonic- Servomotoren. *durch hochpräzise Planetengetriebe. *Nutzlast von 1kg bis 15kg. *Arbeitsdurchmesser von 350 mm bis 1400 mm.

1. RTX2060 6G GDDR6 Ultrahochleistungs-Grafikkarte 2. Der neueste Kern der zehnten Generation 6-Kern i5-10400Hochleistungs-CPU 3. bunt hinterleuchtet Tastatur, 1920 * 1080 voll HD 144Hz 45 % IP-Bildschirm 4, 8GB DDR4, 512G SSD Massenspeicher

Nachhaltiges Umweltschutzkonzept: *Die Karosserie nimmt ein Aluminiumlegierungsskelett an *Den Einsatz von Stahl im Produktionsprozess erheblich reduzieren und indirekt das Umweltschutzniveau verbessern Elektrische mobile Plattformen

Trl Serienroboter Stapelung Unbemerter Gabelstapleranwendung Szenarien: Fabriken, Lagerhaltung, Workshops, Logistik usw.hauptsächlich für den Haufen Höhe verwendet.

4 Hauptanwendungen von Exoskelett-Roboterthemen : *Robotersteuerung *Human Factors Engineering *Biologie *Rehabilitationsmedizin

Abwasserbehandlungsanlagen r Engel: 1. Entfernung von Schwebstoffen im Abwasser nach biochemischer Behandlung. 2. Fest-Flüssig-Trennung in industriellen Prozessen ①Trennung und Waschen von Schlamm in der Hydrometallurgie ②Filterung von Abwasser aus der Wolframschmelze vor der Trennung ③Fest-Flüssig-Trennung von Magnesiumhydroxid-Schlamm ④Fest-Flüssig-Trennung von Kohlengrubenwasser. 3. Vorbehandlung des Umkehrosmose- oder Nanofiltrationsprozesses.

MIG und WIG Schweißroboter für Stahl, Edelstahl und Aluminium usw. Für diesen Roboter ist ein Lasernaht-Tracking-System verfügbar !

Motor: 4 Schlaganfall; Sitze: 3; Leistung:> 300HP; Batterie : 12V, 36A 4 Zylinder; Farbe: optional; Artikel Größe: 3100 * 1200 * 1100mm Maximum Last: 200kg; NET Gewicht: 300kg; Motor Verschiebung: 1300cc Maximal Leistung: 63 kW (6000 U / min); Einzelpaket Größe: 31x12x11 cmSingle Gross Gewicht: 20.000 kg; Maximale Kraft : 63kw (6000 rpm) maximales Drehmoment : 11nm (4000 rpm); Schmiersystem trockenes Öl KühlsystemWasserkühlung doppelt Schleife; StartmethodeElektrischer Start ECU Treibstofftank Kapazität : 35l; Ölmenge : 3.5l; Anlasser : 380w

Prozess der Produktionslinie für Kartoffelchips/Pommes Frites: Für den Transport der Lebensmittel kommen Doppelmaschenbänder zum Einsatz, wobei die Geschwindigkeit der oberen und unteren Bänder variabel einstellbar ist. Ein automatisches Hebesystem erleichtert die Reinigung im Inneren der Maschine und gewährleistet eine kontinuierliche Produktion bei konstanter Temperatur. Darüber hinaus verfügt die Maschine über ein automatisches Rauchabzugssystem. Durch den Öl-Wasser-Mischprozess sinken Speisereste automatisch ins Wasser und halten die Öloberfläche sauber. Das Heizsystem verwendet elektrisch beheiztes Thermoöl, um das Speiseöl indirekt zu erhitzen. Dadurch wird der Temperaturanstieg des Öls beschleunigt und die Karbonisierung beim Frittieren reduziert. Dies gewährleistet die Ölqualität und verlängert die Lebensdauer.

Ultraschall Modelle: 20K2000W; 20K2600W; 15K2600W. für ein bis zwei Zeilen Gesichtsmaskenmaschine hohe Geschwindigkeit eins zu 1line Gesichtsmaskenmaschine KN95 Gesichtsmaskenmaschine KF94 Gesichtsmaskenmaschine

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Allround-KI-Roboter, der ein neues Betriebsniveau definiert:Schneller, reibungsloser und sicherer – TR-S1 ist Vorreiter einer KI-orientierten integrierten Hardware- und Software-Systemarchitektur. Durch die enge Verbindung von KI-Intelligenz und leistungsstarker Bedienung kann das System wie ein Mensch lernen, denken und arbeiten und sicher und intelligent mit anderen interagieren.

Die ai Roboterfrau mit echter Haut ähnelt Ihrer echten Freundin. individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Produktion Geschwindigkeit: 40 Stück / Minute Maschine Bediener: 1 Persongeeignet für N95 / KN95 Lieferanten von Gesichtsmasken im Land !

TR-R12 Kollaborativer Roboter:Großer kollaborativer Roboter mit standardmäßigem Industrie-Schaltschrank, geeignet für die Montage schwerer Objekte, Palettieren, Be- und Entladen und andere Anwendungen. Wiederholgenauigkeit ±0,03 mm, absolute Positioniergenauigkeit ±0,5 mm – erfüllt die Anforderungen industrieller Szenarien mit höherer Belastung!

Eigenschaften des Killerbody Bumblebee Helms: Gewicht der Einheit: 1,8 kg Produktvolumen: 38 cm * 38 cm * 38 cm Material: ABS Funktion: Musik/Sprache, Verformungsumschaltung, Bluetooth-Audio Herkunft: Festlandchina Marke: Killerbody Produktkategorie: Transformatoren Steuermethode : Sprachsteuerung Ob elektrisch: ja Stromversorgungsmodus : Batterie Verpackung: Farbkasten Anime-Charakter: Bumblebee

Anti-Interferenz-Positionierungstechnologie: Basierend auf der 20-jährigen Erfahrung des Teams beim Aufbau des Beidou-Satellitensystems (GNSS) und der Anwendungsakkumulation der neuen Generation von Informationstechnologie produziert die störungsfreie Positionierungstechnologie eine Reihe von Chips/Platinen/Modulen mit den Vorteilen der vollständigen Eigenentwicklung, der inländischen Produktion, der hohen Integration und der hohen Störungsfreiheit.

【Modell】TR1006A-20MZ 【Aktionstyp 】Mehrgelenktyp 【 Nennlast】6kg 【Bewegungsradius】2000mm 【Gewicht】170kg 【Anzahl der Achsen】6 Achsen

Lötroboter sind für die Fabrik mit elektrischen Komponenten wie Samsung, Foxconn, LG ausgelegtund Kanon usw.

Name: Ölfass-Gabelstapler Marke: OEM Stahlblechstärke: Gabel 8 mm Gewicht: 50 kg Maximale Hubgeschwindigkeit: 20 cm/s Anzahl der Rollen: 4 Rollenmaterial : Nylon Blechstärke: 4 mm Vierkantrohr Spezialbranchen: Logistikindustrie / Be- und Entladeteams / Fabriken Tragfähigkeit: 500 Gabellänge: 90cm

Die SCARA MehrfachverbindungManipulator gehört zum Unternehmen hochpräzise, schnelle und leistungsstarke Roboter This Das Produkt ist hauptsächlich für die Anwendung von Roboter-Verriegelungsschrauben im 3C vorgesehenIndustrie This Das Produkt basiert auf dem zuvor entwickelten SCARA Roboterkörper mit 600 Armlängen. eine spezielle nicht standard Roboter zum Verriegeln von Schrauben mit visueller Positionierung Funktion.
Technische Daten der Knödelmaschine Abmessung: 3400*2850*2000 Modell: ZK-3-SJ Erzeugungsrate: 14000/Stunde Leistung: 280 kg/Stunde Leistung: 12,9 kW Leistung: 380 V 50 Hz (3P)

Das RPNS-Steuerungssystem (ROBOT POSITIONING NAVIGATION SYSTEM) verfügt über Funktionen wie Messung, Wahrnehmung, Navigation, Positionierung und Steuerung. Es nutzt eine offene technische Architektur und lässt sich an gängige Roboter-ECUs/VCUs anpassen. Dadurch können Hersteller die Sekundärentwicklung selbstständig durchführen. Das System ermöglicht den nahtlosen Zugriff auf verschiedene nachgelagerte Terminals und findet breite Anwendung in Logistik, Inspektion, Sicherheit, Vermessung und Kartierung, Supermärkten, im Einzelhandel und anderen Bereichen.

Plasma / Flamme Schneidemaschinensteuerung berühmte Marke in China CNC Industriebereich einfache Bedienung und mehrere Funktionen Technischer Online-Support

Die intelligente Erklärung der Kreuzfahrt führt automatisch den Weg: * Adopt fortschrittliche drahtlose Lasernavigationstechnologie zum schnellen Scannen und Erstellen von realen Karten. * Automatisch Kreuzfahrt Erklärung, genaue Lage * Stimme Die Aktivierung führt automatisch zum angegebenen Ort * Mehr als 70% Versorgungsgebiet, Panorama-Straßenverhältnisse, sicheres Hindernis Vermeidung.

Zweck und Charakteristik : This Sterilisationsmaschine kann 99 % schnell tötenBakterien und Viren, einschließlich:Influenza, Hepatitis-Virus, e. coli, goldgelber Staphylococcus aureus, Bacillus subtilis variante Sporen und verschiedene schwarze Mehltauquellen Körper, die Allergiequelle, auf das tägliche Leben der Menschen, um eine sichere Umgebung zu schaffen, besonders geeignet für Geschirr, Lebensmittel, Kosmetika, chinesische Kräuter und öffentliche Güter, Kinder Spielzeug und andere Gegenstände wie schnelle Desinfektion und Desodorierung der Oberflächezusätzlich zum Geschmack

Dieses Gerät ist ein hochwertiges Produkt, das wir entsprechend der Marktnachfrage entwickelt haben, nachdem wir die Vorteile europäischer Modelle kennengelernt haben. Wird hauptsächlich zum Verpacken von medizinischen Nitril-/Latex-Einweghandschuhen verwendet. Kontinuierliches Modell, einfach zu bedienen und gute Stabilität. Neu verbessertes Luftstrahlgerät, das Endprodukt ist glatt und schön.

MIG und WIG Schweißroboter für Stahl, Edelstahl und Aluminium usw. OEM Kunden sind mehr alswillkommen !

Merkmale der Laserreinigungsmaschine TR-CL2000: 1. Hochleistungs-Faserlaser-Laser-Reinigungsmaschine 2. berührungslose Reinigung, keine Beschädigung der Teilematrix 3. präzise Reinigung, kann eine präzise Ortung, präzise Größe, selektive Reinigung erreichen 4. Die Bedienung ist einfach, Einfach einschalten, und es kann in der Hand gehalten oder mit dem Manipulator zusammengearbeitet werden, um eine automatische Reinigung zu realisieren. 5. die Reinigungswirkung ist sehr hoch und spart Zeit. 6. Das Laserreinigungssystem ist stabil und erfordert fast keine Wartung.

Modus: TR-ARG02 Spezifikationen: CPU: Vierkern-CPU / Arbeitsspeicher: 2 GB / ROM: 32G Betriebssystem: Android 9.0 Optische Einheit: Dual Eye Single Green Micro LED-Bildschirm Linse: Beugungswellenleiterlinse Auflösung: 640x480 Physische Tasten: Einschalttaste, Funktionstaste, Zurück-Taste Mikrofon: 5-Mikron-Array Interaktionsmethode: Touch-Steuerung, Telefon-Bluetooth-Steuerung, Ring-Steuerung Lautsprecher: Dual-Richtungslautsprecher mit auslaufsicherem und Privatsphäre-Design Kontrollleuchte: Dreifarbige LED Gewicht: 61 g; Batterie: 440 mAh; Schnittstelle: Typ C.

FPC-Maschinenmodell: TR-CA5252 Konventionelles FPC -Board/New Energy FPC Board, Cover Film, EMI, Ganzblatt zu Blech oder Blech zum Rollen.

Roboteranwendungen - Sprühen, Materialhandling und Palettieren größere Flexibilität, stabilere Leistung und geringerer Energieverbrauch;maximaler Durchsatz bei hoher Leistung; lange Arbeitszeit;feste Automatisierung.

Der Roboter für Übertragungsleitungsinspektion verwendet eine doppelte Bildgebungseinheit, ein Edge-Computing-Modul und ein hochpräzises Positionierungsmodul, um die Fernüberwachung des Betriebsstatus wichtiger Geräte, ein Klick-Ankunft an wichtigen Standorten, die intelligente Wahrnehmung von Arbeitsbedingungen um Abschnitte und Defekten Alarme für Infrastrukturen zu erreichen.

* Produkt Vorteile:schnelle Geschwindigkeit, hohe Präzision * Long Lebensdauer und stabile Leistung * Stark Kompatibilität und starke Flexibilität * Einfach Kontrolle und Benutzerfreundlichkeit

Autonome Navigation, flexible Hindernisvermeidung, Routen, Trajektorien können eingestellt werden willkürlich. Cyclic Wheeling & in schweren verschmutzten Bereiche schrubben bis Alle Bereiche haben gereinigt.

Hochgeschwindigkeits- und zuverlässige Delta-RoboterEs istmit panasonic aufbauenServosunterstützt Vision Camera in Produktionslinien

Der Handhabungsroboter eignet sich hauptsächlich für große Lasten und groß angelegte Arbeitsanlässe. Industrieroboter für die Materialhandhabung verfügen über eine gute Gesamtleistung und eine hohe Laufgeschwindigkeit.

Parameter des Cobot CS63: sechs Freiheitsgrade, Gewicht 14kg, Belastung 3kg Arbeitsradius 624 mm Wiederholpositioniergenauigkeit ±0.02mm Höchstgeschwindigkeit 2.0 m/s typische Leistung 150w Schutzart IP54

Die Auslegerpositionierstation ist eine automatisierte Lösung für die Handhabung großer, schwerer oder unregelmäßig geformter Werkstücke. Sie unterstützt Schweißroboter bei omnidirektionalen Arbeitsgängen durch Bewegen, Wenden und Drehen des Werkstücks im dreidimensionalen Raum und spielt somit eine entscheidende Rolle in Bereichen wie Maschinenbau, Schiffbau und Windenergie. Kernstück der Station ist der integrierte Auslegerpositionierer.

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

【Modell】TR1030A-230 【Aktionstyp 】Mehrgelenktyp 【 Nennlast】30kg 【Bewegungsradius】2300mm 【Gewicht】700kg 【Anzahl der Achsen】6 Achsen

Ausstattung der Spritzgießmaschine: Präzises Schließsystem, hervorragende Effizienz, effizienter Servoantrieb, alle werden allen Anforderungen gerecht. Konzentrieren Sie sich auf Kundenprodukte, bieten Sie den Kunden ein komplettes Set an technischen Lösungen und schaffen Sie bessere Investitionsrenditen und Kundenerlebnisse für globale Kunden.

Die Metalllaser-Reinigungsmaschine, auch Metall-Laser-Entrostungsmaschine genannt, ist ein handgeführtes Laserreinigungsgerät und eine neue Art von High-Tech-Maschine zur Oberflächenreinigung. Es kann ohne chemische Reagenzien, mittleren Staub und Wasser arbeiten.

Funktionen des elektronischen Mikroskops: Modell: TVN-S6000NMXTyp: Elektronenmikroskop Auflösung: 1920 x 1080 Bildrate: 60 fps. Optische Größe: 1/1,2 Zoll Netzwerkschnittstelle: 100 MB/s.

Tandempressenlinie Beschreibung: 1. Die Verwendung der Frequenzumsetzungsgeschwindigkeitsregelung kann die Produktionsgeschwindigkeit flexibel anpassen. 2. Zwei optionale Modi: kontinuierlicher Fördermodus und schrittweiser Fördermodus. 3. Die Produktionslinie kann über die Förderlinie angehalten werden, was für die Kunden praktisch ist. 4. Der Riemen besteht aus verschleißfestem Material.

Gewerblich vollautomatisch Spiegelei-Maschine : Dies ist vollautomatisch. Spiegelei-Maschine Ausgestattet mit Touchscreen-Bedienung und intelligenter Temperaturregelung, bereitet das Gerät ca. 1–120 Eier pro Stunde zu. Sie können zwischen medium-rare, medium-well und well-done wählen, wodurch Sie die Hände frei haben und die Bedürfnisse einer breiten Kundschaft erfüllen können.

ähnlich deine echte Freundin individuelle Körperform, Gesichtsausdruck und Augenfarbenoptionen usw. warm Körperfunktion fließend Englisch und Chinesisch sprechen

Vorteile der Laserschneidmaschine: Systemintelligenter Alarm Multidirektionaler anormaler Gerätealarm wird direkt an die Zentrale übermittelt, sodass Geräteausfälle im Voraus bekannt sind, versteckte Gefahren reduziert werden und die Effizienz der Untersuchung von Geräteanomalien verdoppelt wird

Auto Faltbarer Roller Eigenschaften: 1. Einzigartige Fernbedienung Faltendesign, einfach zu tragen und Lagerung. 2. Elektromagnetisches Bremssystem sorgt für Sicherheit. 3. Aluminiumlegierungsrahmen für geringes Gewicht und Kraft. 4. 3 Falten Methoden: Remote Steuerung / Handbuch / elektrisch wechseln. 5. Ausgestattet mit hochwertiger lösbarer Lithium-Batterie. 6. LCD-Anzeige, Leistung, Geschwindigkeitsanzeige bei einem Blick.

Beim Laserpunktschweißen wird das Material mit hochenergetischen Laserpulsen auf kleiner Fläche lokal erhitzt. Die Energie der Laserstrahlung diffundiert durch Wärmeleitung in das Innere des Materials, und das Material wird aufgeschmolzen ein spezifisches Schmelzbad. Laserpunktschweißgeräte (Schmuckpunktschweißgeräte) können dieselben oder unterschiedliche Materialien miteinander verschweißen. Die Produkte der TR-PMC-Serie werden durch die Einführung fortschrittlicher deutscher Designtechnologie verbessert. Diese Produktserie nimmt ein ergonomisches Design an und wird mit international erstklassigem Zubehör hergestellt. die gesamte Maschine ist zuverlässiger, langlebiger, bequemer und effizienter.

Roboter Eigenschaften: großer Rotationsgrad, breite Anwendbarkeit unabhängige Formöffnung, Aluminiumprofil geformte Struktur, schönes Aussehen Handprogrammierer, Programmieren ist schnell und einfach Abgabegeschwindigkeit und Leimmenge können individuell eingestellt werden Hochpräzise Schrittmotorsteuerung, präzise Abgabespur kann verwendet werden, um Raumpunkte, Linien, Bögen und andere beliebige Formen auszugeben Eine Vielzahl von Dosiernadeln, Spritzen, Dosierventilen und Steuerungen für unterschiedliche Anforderungen

4-Achsen-Delta Roboter / Spinne Roboter sind für die Lebensmittelverpackung geeignetDas Robotersichtsystem ist verfügbarauch !

[Anwendungen in der Lebensmittelindustrie] Die Delta-Robot-Technologie ermöglicht das schnellste Greifen und Platzieren von losen, verpackten, in Kartons verpackten und konservierten Produkten auf den entsprechenden Förderbändern oder Verpackungskartons. Dies ermöglicht das Sortieren, Verpacken, Handhaben und Anordnen von Lebensmitteln, minimiert den manuellen Eingriff während der Produktion und standardisiert und automatisiert den Fertigungsprozess für eine hocheffiziente Steuerung.

*Die flexible Robotergreifbewegung der weichen Zange ähnelt der menschlicher Finger. *Sehr flexibel und kann Objekte adaptiv umwickeln, ohne physischen Schaden zu verursachen. *Maßgeschneidert für Kunden, die intelligentes, beschädigungsfreies, hochsicheres und äußerst anpassungsfähiges Greifen verlangen.

Der kollaborative Palettierer-Arbeitsplatz ist ein kleiner Umzugsexperte, der speziell auf die Branchen Lebensmittel, Medizin, 3C, Lebensmittel, Druck, tägliche Chemie und andere Branchen zugeschnitten ist. Es wurde mit visueller Programmierung entwickelt und die Eingabe von Informationen dauert nur 5 Minuten. Produkte/Kartons werden auf Holzbrettern gestapelt, um eine mannlose Handhabung zu ermöglichen. Das benutzerfreundliche visuelle Programmierdesign erleichtert dem Bediener die Bedienung des Roboters. Der für hohe Lasten ausgelegte Endeffektor kann Produkte mit einem Gewicht von bis zu 20 kg greifen. Die Maschine zeichnet sich durch flexiblen Einsatz, geringe Stellfläche, einfache Verkabelung, einfache Wartung und hohe Effizienz aus. Es kann 8-10 Kartons in 1 Minute palettieren.

Eigenschaften des elektrischen Surfbretts: Jahreszeit: Sommer, Frühling Geeignet für: Universal Altersgruppe: Erwachsene Eigenschaft: Leicht und hochwertig Material: Kohlefaser Produktname: Efoil Electric Surfboard

7 Zoll Farbe hochauflösende Bildschirmanzeige Stanzregler, Anzeigesysteminformationen, reichhaltige Schnittstelle kann der Parameterauswahl sowohl in Chinesisch als auch in Englisch vorgenommen werden.

1. Batteriekapazität: 13300 400Mah 2. Saft Kapazität: 2.0 ml 3. Nikotin Salz: 3 % - 6 % Wahl 4.500 ports / übertragen drei Filter 5. Ausgangsspannung: 3.6V 6. Größe: Φ14 * 85mm 7. Material:Edelstahl 304 8. Farbe kann angepasst werden 9. Geschmack kann angepasst werden

Eigenschaften des Glaswand-Reinigungsroboters für große Höhen: Robotergröße: 1377*1000*288 mm Fahrmodus: Saugnapf-Adsorption und Radbewegung, automatisches/manuelles Fahren möglich. Fähigkeit zur Überwindung von Hindernissen: Konkav-konvexe Höhe überschreitet nicht 10 mm. Reinigungseffizienz: 720㎡/h . Batterielebensdauer: 3 Stunden/Batterie (±30 %).

Der auf visueller Wahrnehmung basierende autonome mobile Roboter tr-max600l hat einen geschickteren Körper und kann sich auf engem Raum frei bewegen, um die Anforderungen von Einsätzen an allen Einsatzorten zu erfüllen Mischbetrieb. Erschließung weiterer Anwendungsszenarien durch eine Vielzahl von Aufbaumodulen.

Funktionen des TR30 Cobot: TR30 ist eine neue Generation sechsachsiger kollaborativer Roboterprodukte, die auf Mensch-Maschine-Kollaborationstechnologie basieren und Anwendungsszenarien wie Palettieren, Handhabung und hohes Drehmoment abdecken. *Nutzlast: 30kg *Arbeitsradius: 1403 mm *Wiederholgenauigkeit der Positionierung: ±0,1 mm.

Artikel Typ: Handheld-Spiel Konsole: Spiel Typ: RPG Rollenspiel, Akt Action Spiel, Durchschn Abenteuerspiel.Betrieb System: liunx RAM: 16g Schnittstelle Typ: USB Video / Audio Schnittstelle: HDMI Verbindung Methode: verdrahtet Zusätzlich Eigenschaften: MP3 Musikspieler Videospiel Klassifizierung: Fieber, Elite, Hardcore

ROKAE CR35-35C xMate kollaborativer Roboter – 35 kg, 6 Achsen, 2246 mm Reichweite Produktübersicht Der ROKAE CR35-35C ist ein hochbelastbarer 6-Achs-Kollaborationsroboter der nächsten Generation, der für Anwendungen mit maximaler Nutzlast entwickelt wurde. Mit einer Tragfähigkeit von 35 kg und einer erweiterten Reichweite von 2246 mm bietet er herausragende Leistung für anspruchsvolle Aufgaben in der industriellen Automatisierung. Wichtigste Spezifikationen Nutzlast 35 kg Erreichen 2246 mm DOF 6-Achsen IP-Schutzart IP67 Regler xMate Steuerschrank (MCC) Erweiterte Funktionen Kraftmessung mit Gelenkdrehmomentsensoren Über 21 TÜV-Funktionssicherheitsmerkmale Direkte Lehre mit 1N Kraft Programmierung mit grafischen Flussdiagrammen Rokae Studio Offline-Simulation Option für schrankloses Design verfügbar Anwendungen Schwerpalettierung, Bedienung großer Maschinen, Großmontage, Logistikautomatisierung, Baustofftransport. Warum TROY Supply? Als autorisierter ROKAE-Partner bietet TROY Supply wettbewerbsfähige Preise direkt ab Werk, professionellen globalen technischen Support, Installation und Schulung vor Ort sowie einen umfassenden Kundendienst. Kontaktieren Sie uns für eine individuelle Lösung und ein Angebot. Marke: ROKAE | Technischer Partner: TROY Supply | Hergestellt in China

M820 Serie Produkt Feature: * 50% Reduzierung der Volumen- und Verdrahtungszeit * 30% Energieeinsparungen. * 3.2khz Antwortgeschwindigkeit

Beschickung → Schneckenextrusion → Schmelzefiltration → Dosierleistung → Düsenkopfextrusion → In die Spinndüse → Heißluftzug → Netzvorhang → Elektretverarbeitung → Umspulen
Atombatterien können 50 Jahre lang stabil und autonom Strom erzeugen, ohne dass sie aufgeladen oder gewartet werden müssen. Sie befinden sich in der Pilotphase und werden in Massenproduktion auf den Markt gebracht. Betavolt-Atombatterien können den Bedarf an langlebiger Stromversorgung in verschiedenen Anwendungsbereichen decken, beispielsweise in der Luft- und Raumfahrt, in KI-Geräten, medizinischen Geräten, MEMS-Systemen, fortschrittlichen Sensoren, kleinen Drohnen und Mikrorobotern. Diese neue Energieinnovation wird China dabei helfen, in der neuen Runde der KI-Technologierevolution eine führende Rolle zu übernehmen.

Der Hauptkörper der Raumkapsel besteht aus einem feuerverzinkten Strukturrahmen und einer mit Fluorkohlenstoff lackierten Luftfahrtaluminiumschale aus Aluminiumlegierung. Es verwendet klassische Farben, um den visuellen Effekt zu verstärken. Die geometrische Sprache ist klar und ordentlich, und das grafische Design-Layout hat ein sanft geschwungenes Erscheinungsbild und vernünftige Funktionen. Es kann mit einem Aussichtsbalkon für engen Kontakt individuell gestaltet werden. Natur, das Innere der Raumkapsel zeichnet sich durch großen Raumkomfort, großzügige Panorama-Oberlichter und räumliche Erweiterbarkeit aus. Die Gesamtstromlinienform des Rahmens ist einfach und klar, das Layout ist traditionell und effizient und es kann an eine Vielzahl von Szenarien angepasst werden.

QS7AA020M AC-Servotreiberist eine neue Generation von Allzweck-Servomotortreibern, die auf Basis von QS6 optimiert und verbessert werdenSerien-Servotreiber. stabiler und bequemerreifer und stabiler, reichhaltiger und vollständiger Informationen. Die Servotreiber addieren zu 485 neue Kommunikationsfunktionen, bequemere und zuverlässigere Verbindung mit dem Host-Computer oder der Controller-Software
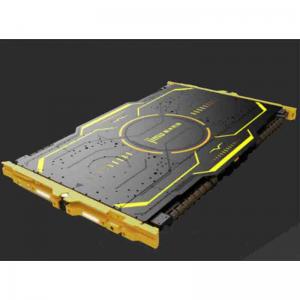
DIE 4. GENERATION des Roboterparkens: Die vierte Generation des Parkroboters verfügt über das neue patentierte Design mit mittig positionierten Roboterarmen und Differentialantriebseinheiten, während die Software und der Algorithmus ebenfalls umfassend optimiert wurden. Darüber hinaus hat der Parkroboter den Abnahmetest des CSEI (China Special Equipment Inspection And Research Institute) bestanden, was den Betrieb von Robotern auf Parkplätzen gewährleistet.

1500cc Allradantrieb 107 Pferdestärke 4 Zylinder durch Kraftstoffeinspritzung

* 5-Achsen-Laserschneidmaschine * 1,8 G Beschleunigung * Kompatibler Rohrdurchmesser von 6–115 mm * Rundrohr, Vierkantrohr, Rechteckrohr, Ovalrohr usw. * Laserleistung von 1kw - 3kw.

TROY AMR Robot öffnet das SDK für alle Benutzer, bietet umfangreiche API-Schnittstellen, ist stark erweiterbar und verfügt über bestimmte Entwicklungsmöglichkeiten . Aus Kundensicht kann eine kundenspezifische Entwicklung entsprechend den Anwendungsanforderungen der Szene realisiert werden, die den vielfältigen Anforderungen entspricht des Marktes für mobile Roboterchassis.

liefern y.Roboter Features: Körper Länge / Breite / Höhe: 3650 * 1560 * 1950mm Fahrzeugausrüstung Qualität: 770kg Maximum Last: 1000kg Gradbarkeit (Nein laden): 20% Maximum Geschwindigkeit: 30km / H Aufladen Kilometerstand: 100km Mindestbetrieb Temperatur: -10 ℃ Maximaler Betrieb Temperatur: 50 ℃

Inspektion Vierbeinig Roboterhund Anwendungen: Aufgrund der Anwendungsanforderungen in komplexen und gefährlichen Umgebungen bietet es intelligente Lösungen für Anwendungsszenarien wie Firefighting und Rettung, Anti-Terrorismus und Anti-Explosion.

1100CC 4 Räder fahren 67 Pferdestärken 4 Zylinder durch Kraftstoffeinspritzung

CNC9620 CNC Drehmaschinensteuerung Einführung: ADTECH speziell für kleine und mittlere Werkzeugmaschinenhersteller im In- und Ausland unabhängige Forschung und Entwicklung kostengünstiger CNC Steuerung System. Verwenden Sie Arm Hochleistungs-CPU und Super-Large-Scale programmierbarGeräte-FPGA, Echtzeit Multitasking Steuerungs- und Hardware-Interpolationstechnologie zur Sicherstellung einer hohen Effizienz des Systems unter um-Ebene Präzisionsbearbeitung 256M elektronisches Panel trifft auf eine Vielzahl von großen Programmarbeiten7 Zoll Farbbildschirm, Schnittstelle kann der Parameterauswahl in Chinesisch und Englisch gemacht werden.

Yaskawa Scara Robot SOC-Serie: Bei der MOTOMAN-SOC-Serie handelt es sich um einen SCARA-Roboter, der speziell für Hochgeschwindigkeitseinsätze entwickelt wurde. Es eignet sich für verschiedene Szenarien wie Montage, Transport, Verpackung, Sortierung und Inspektion von Kleinteilen.

Merkmale der hochpräzisen elektrischen Parallelgreifer der TR-HEPG-Serie: *Hohe Präzision *Hohe Steifigkeit *Fünfseitige Installation *Greifrückmeldung *Netzwerkanwendung

Amphibische UTV-Funktionen: Rumpfmaterial: Fiberglas Modell: TR-AUTV04 Spezifikation: 1500 cc Luftpumpe: ja Maximale Anzahl der Insassen: 2 Maximale Belastung: 200 kg

Vierachsen CNC-Steuerung, Vorrichtung für großen Kegelwinkel. Gehäuse der Gießmaschine aus Eisenharz, Metallleitblech, benutzerfreundliches Design, zentrales Schmiersystem, automatische Fadenspannungseinrichtung, digitale Skala und Anzeige, hochintegrierte Steuerung für einfache Wartung und Fehlersuche, Windows-Basisschnittstelle, AutoCAD-Programmierung und einfache Bedienung.

* Delta-Roboter sind kostengünstig, hochwertig und kostengünstig, können für Kunden im OEM-Design angepasst werden und unterstützen verschiedene visuelle Sensorinformationen. * Das TRD-Roboteranwendungssystem besteht hauptsächlich aus drei Teilen: Roboter, Drahtzuführung und Roboterinstallationsrahmen. Der Roboter besteht aus einem Substrat, einer Motorabdeckung, einer rotierenden Welle, einem Hauptroboterarm; Es besteht aus einem mechanischen Hilfsarm und einem Greiferzentrum.

1,6-Tonnen-Einzelpersonen-Gabelstapler mit oszillierender Reichweite Standardkonfiguration: Der 1000ah Akku füllt sich automatisch mit Wasser nach. Integrierter Griff. Hoesch-Mast aus Deutschland importiert. Fluchtgerät, Notfallgerät. Aktive Sicherheit: Ohne Grundstellung kann die Gabel nicht gefahren werden. Vorderräder mit aktiver Dämpfung zur Anpassung an Bodenunebenheiten. Die Vereinigten Staaten importierten Proportionalschieber SUN. Vorderräder in einer Zweiradkonfiguration. Elektrische Lenkung.

Körperliche Sicherheit System: FAR-FELD Schutz: ØFAR-FELD 360 ° 150m Sofortige Mapping, Echtzeit-Positionierung, Navigationsfähigkeit Nahfeld Schutz: ØNear-Field 360 ° Sicherheit Schutz: Ø6m 360 ° Tof Kamera-Tag und Nacht-Hindernisverhinderung Ø6m Ultraschallfusion Menschenüberwachung, Glas Antikollision Øbelow 5 cm Schutz von 3M Kleiner Dot-Pitch-Infrarot-Laser-Array Øanti-Fall und mechanischer Kantenkontakt

Ein professionelles Design, Herstellung aller Arten von Handschuhen Ausrüstung Produktionsunternehmen, seine ausgezeichnete Produktqualität und erstklassigen Service, um den Kunden hohes Lob und Anerkennung zu gewinnen. Bringt verschiedene exzellente Ausrüstungsforschungs- und -entwicklungsmitarbeiter und chemische Talente zusammen und hat mit einer Reihe bekannter in- und ausländischer Hersteller, Unternehmen, Universitäten und Forschungseinrichtungen eine langfristige strategische Partnerschaft geschlossen, die sich der Spitzentechnologieforschung für mechanische Ausrüstung und Entwicklung neuer Produkte.

THR8 Harley Elektrofahrräder sind für die tägliche Arbeit und die tägliche Schulreise mit 70 km konzipiertjedes Mal, wenn der Akku aufgeladen wird

Rehabilitationtation Exoskelett-Roboter: Es kann den realistischsten Gang beim Gehen bieten, eignet sich für viele Krankheiten (einschließlich Schlaganfall, Querschnittslähmung und andere Schwächestörungen der unteren Gliedmaßen, mit geringen Anforderungen an die Kraft der oberen Gliedmaßen), lässt sich schnell tragen und verfügt über eine elektrische Beinlängenverstellung!

Motorrad Abmessungen: 2050 * 620 * 1160 (mm) Brutto Gewicht: 200kg entworfen Geschwindigkeit: bis zu 120km / h Motoreingang Leistung: 72V 5000W

Jaka CobotMerkmale: Der kollaborative Roboter JAKA Zu 18 hat ein Eigengewicht von 35 kg, eine Last von 18 kg und einen Arbeitsradius von 1073 mm; Integriertes Gelenkdesign, einfache Montage und Demontage; Hohe Auslastung, hohe Kostenleistung und hohe Sicherheit bei der Zusammenarbeit; Es ist nicht erforderlich, Schutzzäune zu installieren und es kann harmonisch mit Menschen, Robotern und der Umgebung zusammenarbeiten. Empfohlene Branchen und Anwendungen: Automobilbau, Metallverarbeitung, Spritzguss, Pharma- und Chemieindustrie.

Anwendungen für halbautomatische Etikettiermaschinen: Es kann zum Etikettieren verschiedener Spezifikationen von zylindrischen Objekten verwendet werden, wie z. B. Rotweinflaschen, Getränkeflaschen, Xylit, kosmetische Rundflaschen, orale Flüssigkeiten aus medizinischen Reagenzgläsern usw., ausgestattet mit ganzer/halber Woche Etikettierung und Etikettierfunktionen auf der Vorder- und Rückseite des Umfangs; können Banddrucker, Tintenstrahldrucker und Etikettiermaschinen gleichzeitig Produktionschargennummern und andere Informationen drucken.

Produktmerkmale 1. Der Aerosolgenerator der kalten Erzeugung wird verwendet, um kontinuierliche und stabile Aerosolpartikel zu erzeugen, und das Befüllen des Aerosols ist einfach und bequem 2. Verwenden Sie zwei Sätze hochpräzise Sensoren zur Erkennung von Aerosolpartikeln zur gleichzeitigen Messung der oberen und unteren Kammer 3. Konfigurieren Sie den Aerosolgenerator für Salzpartikel 4. ausgestattet mit statischer Neutralisation von Aerosolpartikeln 5. konfiguriere hochpräzise digitaler Gasflusssensor zur genauen Messung des Gasflusses 6. konfigurieren industrietauglich Temperatur- und Feuchtigkeitssensoren zur genauen Messung der Umgebungstemperatur und Luftfeuchtigkeit in Echtzeit (Test Bedingung: 25 ± 5 ℃ 30 ± 10 % RH) 7. 10-Zoll-Touchscreen, die Bedienung ist einfach und übersichtlich. 8. pneumatische Vorrichtung, leicht zu wechseln Proben. 9. Pumpen und Ablassen der integrierten geräuscharmen Vakuumpumpe, keine externe Luftquelle erforderlich 10. Hochpräzise Manometer und Durchflussregelventil können die Aerosolkonzentration einstellen 11. Mikrodrucker kann Erkennungsdaten drucken 12. intelligente Konfiguration wie Auslaufschutz, Überlastschutz, Ausschalten Konservierung usw. schützen wirksam die Sicherheit der Verwendung 13. An den Computer kann eine spezielle Testsoftware angeschlossen werden.

Produktion Modell: Fisch Stil (KF94). Geschwindigkeit: 120 + PC / min Mangelrate Produktion: weniger als 1%. Gesichtsmaske für Erwachsene Größe.

Wanddrucker Vorteile: Die Wandmalmaschine verwendet einzigartige umweltfreundliche Pigmente, die Farben sind voll und frisch, langlebig und wasserdichtFür die Wandgestaltung ist kein handgemaltes erforderlichMeister, ein Bild kann angepasst werden, der Computer wird eingerichtet, die Malausrüstung wird selbst injiziert, jeder kann es bedienen, Sorgen und Mühe sparen, eine große Anzahl von Bibliotheken als Manuskript, kreative Ideen, was auch immer Sie wollen, was Sie sehen
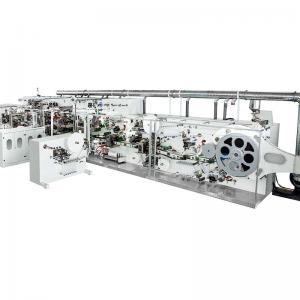
Babywindelmaschine Standardspezifikation: 380 x 280 420 x 320 480 x 320 520 x 340; *SPS-Steuerungssystem,Bedienung auf dem Touchscreen,HDTV-Monitor konfigurieren; *automatisches Bahnführungssystem Deutschland BST (optional).
Anwendungen umfassen CNC Bearbeitungszentren, KMG Messzentren, CNC Drehmaschinen, Drahtschneiden, Fräsmaschinen, Schleifmaschinen und andere Geräte und können je nach Kundenwunsch mit verschiedenen Oberflächenbehandlungen verwendet werden

Der mobile kollaborative Roboter MOD selbst ist ein Bediener, der sich autonom bewegen kann. Erledigen Sie rechtzeitig die Aufgaben mehrerer verschiedener Stationen in der Produktionslinie. Verwenden des Mecanum-Radantriebsmodus. Realisieren Sie eine 360 ° -Bewegung in jede Richtung und können Sie flexibel auf kleinem Raum arbeiten, um die Standortnutzung und Produktionseffizienz effektiv zu verbessern. Durch die Anpassung reichhaltiger Endvorrichtungen und visueller Kenntnisse sind verschiedene Geräte, die Greifen, Zusammenbau, Sortieren, Be- und Entladen, Bewegen, Handhaben, Sichterkennung und andere Funktionen realisieren können, genauer, stabiler und effizienter. Zweiarmiges bionisches Design, näher am menschlichen Betriebsmodus, geeignet für eine Vielzahl typischer Arbeitsplätze, die beide Hände gleichzeitig erfordern.

ROKAE SR3: 3kg Nutzlast, 705mm Reichweite, 6-achsiger kompakter kollaborativer Roboter. Entwickelt für präzise Tischmontage, Laborautomatisierung und leichte Pick-and-Place-Aufgaben. Partner: ROKAE | TROY Supply.

ADT-8960 ist 6 Achsen PCI Steuerkarte, es kann zufällige 2,3,4,6-Achsen lineare Interpolation unterstützen. Und Nehmen Sie fortschrittliche Technologie an, der Frequenzfehler ist kleiner als 0.1 %.
Der 6-Achsen-Lernroboter TRE06P kann in der Oberschule und in der Robotertechnik-Ausbildungsschule eingesetzt werden.

Palettierroboterlösungen für Fasswasser: *800 kg Nutzlast *3000 mm Arbeitsradius *0,03 mm Wiederholgenauigkeit *Yaskawa-Servosystem *LNC Robotersteuerungssystem

Industrielle Delta-Spinne Roboter: 400mm-1200mm Arbeitsdurchmesser 1-3kg bewertet Nutzlast KEBA Anhänger lehren

Metallverarbeitung Industrie: Stanzen auf Stanzmaschinen, CNC Be- und Entladen, Werkstückschleifen, Entgraten; elektronische Produkte Industrie: Montage, Prüfung und Handhabung von IC-Chips, Punktschweißen, PCBA Löten, Kleben, Aufschrauben, Einstecken, Werkstück Polieren; Automobil- und Motorradteile Industrie: Handhabung, Kleben, Punktschweißen; LCD / LED und Glasindustrie: Handhabung von Glasplatten, Montage von lcm-Modulen, Handhabung von Siliziumwafern und Bildschirmen;Laser Industrie: Punktschweißen, Schneiden; Haushaltsgeräte Industrie: Montage, Handhabung und Verschraubung von HaushaltsgerätenForschungsbereiche: Schülerunterricht, Schulforschung und Entwicklung.

Chengying——Ultraviolett-Desinfektionsroboter Die Sterilisation ist effizient, sicher und schadstofffrei Signify UV-C UV-Lichtquelle, neues Coronavirus (COVID-2019) Die Inaktivierungsrate beträgt bis zu 99,9999% Nach Recherchen des maßgeblichen Forschungsinstituts (NEIDL) in den USA war das Virus einige Sekunden lang UV-C ausgesetzt. Kann nicht erkannt werden




















Bitte lesen Sie weiter, bleiben Sie auf dem Laufenden, abonnieren Sie und wir begrüßen Sie, uns was zu sagendu denkst
 IPv6 Netzwerk unterstützt 粤ICP备2021036697号
IPv6 Netzwerk unterstützt 粤ICP备2021036697号 Onlineservice
Onlineservice 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com